色々な映像を編集してつなげてます。
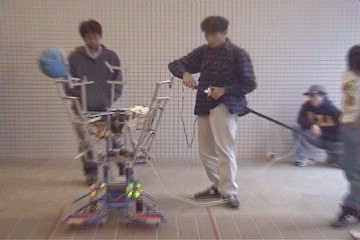 ↓ |
スタート地点。ズームアップ中の映像をキャプチャしたため、なんだか格好いいことに。(^^; 刀型コントローラは、画像のように鞘に収納されています。右手の持ち方は、実際は逆です。 |
 ↓ |
マシンは、ハシゴの横を通り抜けていきます。そして、段差を難無く越えます。(爆) 足まわりはまあまあのスピード。近畿大会では速いほうでした。 |
 ↓ |
アタッキングゾーンBに入ると、横から第4ポールを目指します。 |
 ↓ |
第4ポール真下へ入ると、3本のアームが放射状に展開されます。 |
 ↓ |
その後、上から見て左回りに回転し、アームで全てのポールをつかみます。これがこのマシン最大の特徴。 |
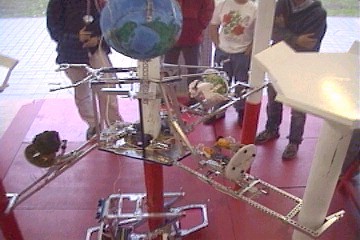 ↓ |
第4ポールを回転する3つのローラーで挟み、マシンが一気に上昇!この上昇する本体の重量は9㎏に達し、土台よりも重いのです。 (そりゃ転けるわ・・・(^^;) |
 ↓ |
最高点まで上昇すると、スポットに当たる拍子で造形物Bがスポットに置かれます。 そして、その部分がスポットに引っかかり、落下ストッパーになります。 |
 ↓ |
アームの中間点にセットしてある造形物Aを第1~3スポットに置きます。 |
 ↓ |
別角度から見た図。造形物Aを置く機構は、パンタグラフ機構の応用です。 |
 |
第1スポットに造形物<木>を置こうとしている所。ここだけ機構が少し違います。 |
感想、質問などもお待ちしております。
制作者(リーダー)にメールする