制御部 - Control -
|
|
|
|
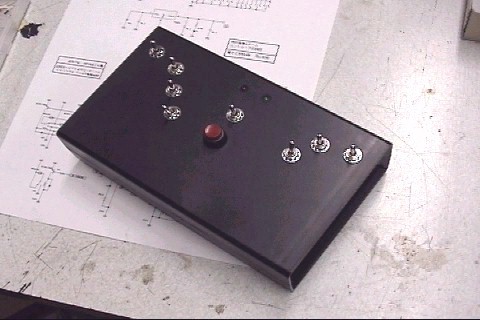
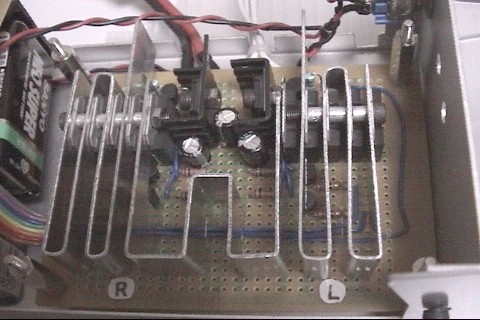
米Microchip社のPICマイコンを1つ使用し、赤外線でマシンを操縦します。
LEDは電源ランプ(赤)とマイコン動作ランプ(緑)で、赤外線送信状況を確認できます。 真ん中のトグルスイッチでマシン2台を切り替え、足まわりのスイッチは2台で共有しています。 足まわりは左右の駆動輪の回転方向をそれぞれ操作するタイプですが、 これは操縦者(私)がこの方法が一番慣れているからです。 更に、人間工学に基づき(笑)最も操作しやすい自然に指を動かせる位置にスイッチを配置し、 手元を見ないで操作できるようにしました。 足まわり以外のスイッチは右半分がカムチャッカ、左半分がクレッシェンドのもの となっていますが、使っていないスイッチも2、3個あったりします。 上から2番目の写真を見ればお分かりかと思いますが、右手の人差し指の位置に 2段階スイッチが付いていて、速度制御を行えます。 赤外線LEDはコントローラ前面に3つ。 通信距離は大会会場並みの照明で5[m]位です。 下から2番目がコントローラボックスを開いた写真です。 9[V]電池を2個並列で使用していますが、1個ででも十分に使えます。 スイッチの配線と基盤は20ピンのコネクタで接続しているので、 ネジを数個と電源コネクタを外すだけで回路基盤のメンテナンスも簡単に行えます。
|
|
|
|

|
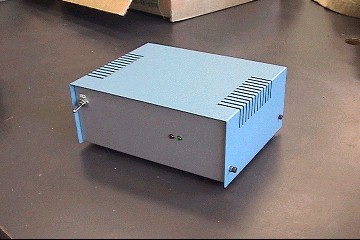
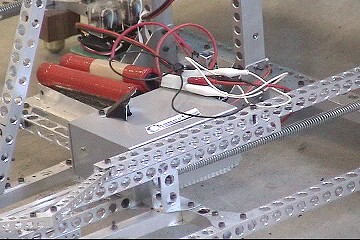
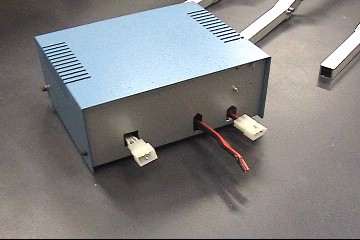
左の一番上の写真が回路箱です。その下が実際にマシンに搭載しているところ。
回路箱の中では基盤をマイコン基盤とモータードライバ基盤に分けて2段にし、
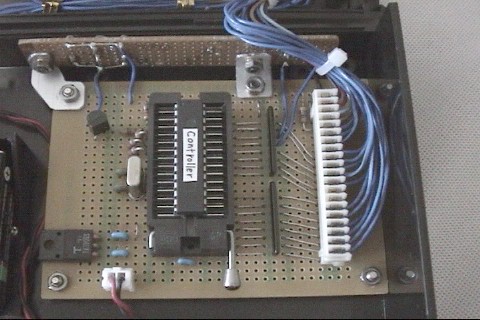
省スペース化を実現しています。下から2番目の写真がマイコン基盤、
一番下の写真がモータードライバ基盤です。 米Microchip社のPICマイコンを1つ使用しています。 LEDは電源ランプ(赤)とマイコン動作ランプ(緑)で、赤外線送信状況を確認できます。 足まわりのモーターは、左右ごとにモータードライバとFETを使用し PWMによる速度制御が出来るようにしています。 アームの制御だけはリレーを使用。 制御するアクチュエータはこの3つの他にはありません。 ローテクで助かりました。 モータードライバICには手製のヒートシンク(アルミ板を曲げただけ)を取り付けています。(一番下の写真) マシンの電源は本番には12[V],4[A]のバイク用バッテリーを使用。 写真ではラジコン用バッテリー7.2[V],1.5[A]×2の直列が使われています。 アームの動きの割には意外と省電力です。
|
|
|
|
|
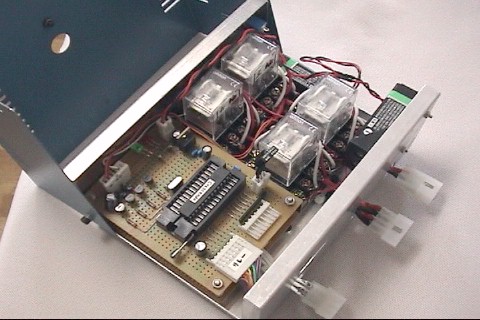
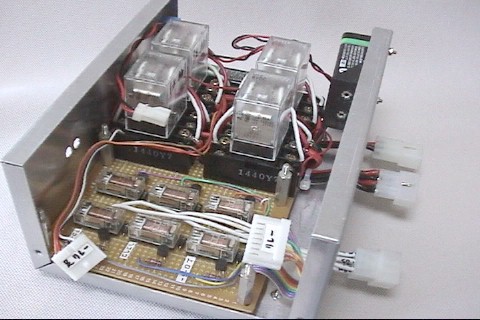
米Microchip社のPICマイコンを1つ使用しています。
LEDは電源ランプ(赤)とマイコン動作ランプ(緑)で、赤外線送信状況を確認できます。 (マシンへ実装されている時の写真1 2) モーターは全てリレーで制御しており、リレーも全て回路箱の中に収めています。 カムチャッカ同様マイコン基盤とリレー基盤に上下を分けており、 下から2番目の写真がマイコン基盤、一番下の写真がリレー基盤です。 赤外線受光部は実装時の写真1の黒い部分です。 左の上2つ写真には写っていません。 マシンの電源は6[V],4[Ah]のバイク用バッテリーです。 本当はそれをマシンの左右に2つ乗せて12[V]にしてバランスをとる予定だったのですが、 6[V]でも動いてしまったため軽量化の一環で1個になりました。 ちなみにこの回路箱、900[g]近くあります。どうしても重量を削れない場合、 この回路箱のふたが取り外される予定でした(笑)
|
|
児山(D4) |
|



{kind=link}
{kind=link}
戻る