近畿大会概要
1998年「生命上陸」から10年。生命上陸で海から陸への上陸を果たした生命が次は進化する。これが今年のテーマ「生命大進化」である。
昨年の振り切った肉弾戦テーマからは離れ、再びエリア別の障害物レースへと復帰。
2005年と2006年も障害物レースだったので、さすがにただの障害物レースにはできない。そして生命上陸の次の一手。ということで導入されたのが多足歩行だ。
エリア別レース、リトライ、遠隔操縦、などと並ぶ高専ロボコンにおける重大転機の1つである。多足歩行ルールは2013年「Shall We Jump?」まで実に6年間続く。
遠隔操縦もそうだったが、ルールでの新たな技術の導入は各チームをふるいにかける。これは近畿地区に限った話ではない。
歩行という今までにない技術についていけた高専と、ついていけなかった高専で大きく明暗が分かれた。
厳密には、歩行機構という設計・製作に大きなリソースのかかる機構と他の機構を両立し、全体として動くところまで持っていけるかというのが課題。
それが高専5年間の1世代以上である6年間も続いたので各校の実力に大きな差がつき、歩行ルールが無くなった後もその影響が影を落としているチームは決して少なくない。
2014年「出前迅速」から歩行ルールは無くなったが、それから8年以上が経った(2022年現在)。
恐らく殆どの高専で多足歩行がロストテクノロジーとなった今、また再び導入されるか分からない歩行ルールの恐怖に今も脅かされ続けている。
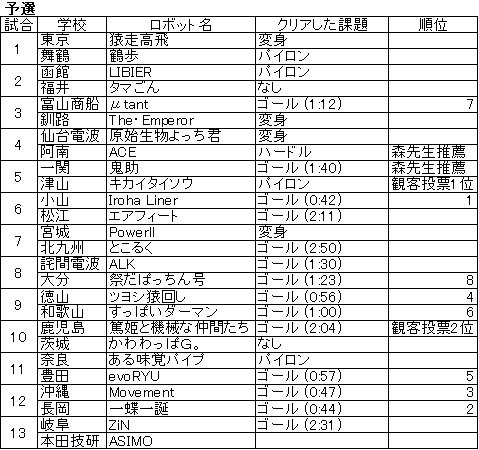
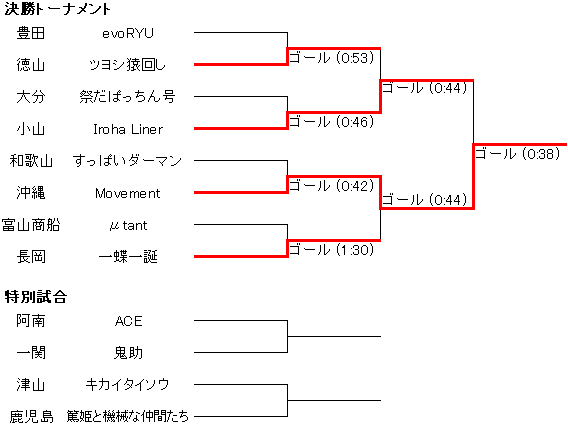
全国大会では予選・決勝トーナメント制が採用され、予選のゴールタイムの上位8位以内のチームが決勝に進んだ。
予選も対戦形式ではあったが、決勝に進むのはタイム順なので、予選で対戦した2チームの両方が進むというケースもあった。
レース形式のルールでは予選タイム選抜は合理的に思える。総試合数も少なくできるし。
全国大会で予選形式があったのは1990年「ニュートロンスター」以来だが、タイム上位が進める形式としては1988年「乾電池カー・スピードレース」に近い。
昨年度から可能となった無線操縦(ラジコン)は今年も継続。
リトライ回数が無制限になったのも地味に大きい。過去には大会1発勝負だったのが、本番中のトラブルにも即座に対応することが求められるようになってきた。
これは、マシンのセッティングのしやすさにも工夫を凝らす必要がでてきたことを意味する。
なおリトライで○秒待機などはなかったので、少し手で調整して即座に再スタートすることができた。
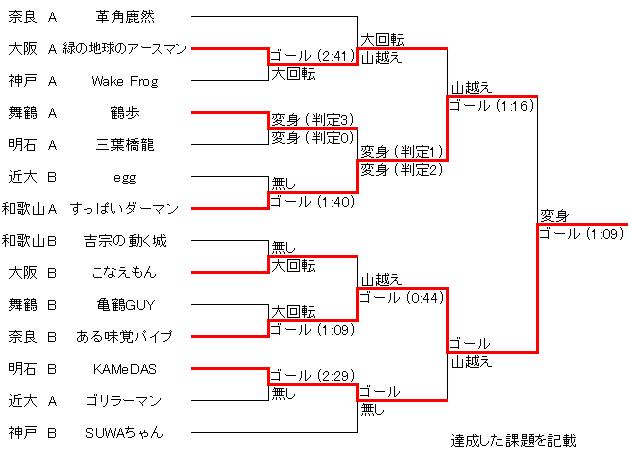
さて、近畿地区でこの歩行ルールに初年度から対応し大きな飛躍を遂げたのが奈良だ。
前年までの数年は振るわない結果だったが、今年は高い完成度と強さで近畿優勝。
和歌山のような全国連続記録は出していないが、近畿地区はベスト4以上が当たり前となり、2010年代以降は全国大会でも上位・各賞の常連に。
全国で最も実力あるチームになったと言って過言ではないだろう。まさに奈良時代の幕開けである(しばらくは和歌山が強かったが)。
新技術導入の年で、地区大会が初週だったにも関わらずこの成果は見事。
奈良の近畿優勝はこれで2回目。意外に少ないとお思いか?ただしこの年以降2022年までの優勝率は50%だ。頭おかしい。全国は4年ぶり4回目となった。
昨年優勝だった和歌山Aは準優勝で3年連続10回目の全国大会へ。
舞鶴Aは独特の歩行でアイディア賞と全国推薦を獲得。全国は2連続9回目。
一方で明暗は分かれていた。歩行に明らかに対応できなかったのは神戸と近大。
神戸に至っては、本年以降6年連続2チームとも殆ど動けず初戦敗退になってしまうのだから歩行の影響は絶大である。
しかも、歩行が無くなった途端(2014年)に優勝するのだから、どれだけ歩行に呪われていたのかと思う(もっとも2014年の優勝は他にも大きな要素があったので呪いはほぼネタ)。
なお格差社会の広がりは、2007年から10年間の近畿全国3枠のうち毎年2つ以上は和歌山・奈良・舞鶴で占められていたことからも見て取れる。
舞鶴A 鶴歩(アイディア賞、マブチモーター賞、全国出場)
独特な歩行方法とデザインで近畿地区を沸かせた、アイディア賞も納得のマシン。
マシン本体のレールの上をバッテリー等の錘がスライドすることで重心を片足に完全に移動させ、ターンテーブル状の足でマシン全体を前方に回転させる。
そこからまた重心をもう片足に移動させることを繰り返して歩行する。
同じような機構のマシンは他にもあったが、鶴歩はこの動きを力士の四股にかけてデザインと変身パフォーマンスを施した。国技館にもつながっており、かけ合わせが妙である。
多足歩行マシンは前後に長いフレームを脚とした左右2脚ずつの合計4脚。二足歩行マシンが非常に大股なので、橋などは使わず、ハードル手前で多足歩行マシンから二足歩行の力士を降ろして四股でハードルを越えていく。
近畿大会1回戦は変身パフォーマンスを終え二足歩行ゾーンを歩き始めたところで試合終了。相手よりも先に進んでいたこともあり判定3-0で勝利。
2回戦はガチの子和歌山Aと対戦するも、相手の変身後のトラブル中になんと逆転。ところが大きく一歩を踏み出したところで転倒しこちらもリトライ。
勝敗は判定となり1-2で敗退。最後は距離的に逆転されていたので判定は難しかったところ。アイディア賞で全国推薦は観客も納得だろう。マブチモーター賞も獲得。
他のチームが全国大会に向けて高速化する中、このチームはデザインを強化。スタートゾーンには国技館の吊り屋根を模したゲートも追加された。
もっともスピード面も改良されていて、近畿大会ではハードル前で一度二足歩行マシンを降ろしていたのが、直接ハードルを超えながら降りるように変更された。
ところが全国予選ではこれがうまくいかず、力士の脚がハードルに当たり禁止ゾーンに接地しリトライ。再スタートはできなかった。
舞鶴B 亀鶴GUY
この頃の近畿で装飾ガチ勢と言えば舞鶴と近大。このマシンはなんとスタート地点に自作の鳥居まで配置していた。この鳥居は本当にただの飾りで、試合中の動作には何も関係しない。
マシンのテーマは浦島伝説。京都に伝わる日本最古の浦島伝説をモチーフに、多足歩行のカメに乗った浦島太郎がハードルを越え、二足歩行の鶴に変身する。
玉手箱を開けた浦島太郎は鶴になるという伝承と、舞鶴もかけたうまいテーマである。
玉手箱から紙吹雪を出したり、煙を模した風船を膨らますなど、変身パフォーマンスにも凝っている。しかし浦島太郎が左右真っ二つに割れるのはなかなかホラーである。
二足歩行の鶴も脚が長く、本物の鶴に近い形を目指している。安定しているとは言えないが、これで翼を左右に広げて歩行できるのだから大したものだ。
大会では初戦で奈良Bとあたり、大回転を終えたところで敗退。試合後に変身パフォーマンスを披露した。
明石A 三葉橋龍(生命大進化賞)
読みはクローバードラゴン。多足歩行マシンと二足歩行マシンで三葉虫から恐竜への進化を表現している。
名前も2つつなげただけだが語呂は悪くない。よく見ると恐竜ではなく橋龍。こういう細かいところにもこだわりたいのです。
多足歩行の三葉虫が卵を運び、ハードルの上を卵が橋で超えて中から二足歩行の恐竜いや橋龍が出てくる。
二足歩行マシンは非常に小型かつ低重心に作られており、本体の上を前後にスライドする脚で接地しながら体を傾けて浮いた脚をスライドさせることで歩行する。
多足歩行マシンはステア機構付きの8脚で非常に高速。ハードル越えの際に橋が思いっきりハードルに引っかかっている(落とさなければOK)ので、これは意図的に攻めて機構を削減したと思われる。
大会では二足歩行マシンの脚が卵に引っかかって出られなくなってしまいリトライ。リトライ後変身パフォーマンスまではクリアし相手に追いついたが判定0-3で敗退。
進化というテーマに即しており、機構も面白い。この年のテーマ賞である生命大進化を受賞。
明石B KAMeDAS(技術賞)
カメです。カメだけどウミガメから立ち上がり二足歩行に進化します。
最大の特徴は、前後左右に動ける多足歩行機構。クランクリンクの小さな8脚のセットを前後移動用だけでなく左右移動用にも用意し、セットごと上下させて移動方向を切り替える。
多足歩行マシン内に二足歩行マシン積み込むとマシンはどうしても大型化するので、単純なパイロン旋回でもパイロンに当たってしまうマシンは実際多かった。
脚の方向ごと切り替えるというアプローチは高速なパイロン旋回に有効な一手法と言える。技術賞の要因だろう。
二足歩行マシンはクランクによるバタバタ方式。旋回はマシン下部で錘を垂直軸で回転させることで実現している。
1回戦・2回戦はトラブルもなくゴール。しかし準決勝ではハードル後に赤外線通信が効かなくなったようでリトライ。この間に相手にゴールされ敗退となった
明石は2006年から7年間全国から遠ざかるという谷の時代があり、その間の近畿地区ベスト4以上はこのKAMeDASのみだった。
この年は全国ブランクの3年目で、かつ歩行が導入されたチャレンジングな年ではあったが、2チームとも歩行には対応できており完成度は決して低くなかった。
奈良A 革角鹿然(東京エレクトロンFE賞)
8脚の多足歩行の鹿が変身するのは、せんとくん。この頃はキャラクターものの制限がぬるく、使用するところは全国的に沢山あったんだよなぁ。
せんとくんも鹿の角が生えてるから、変身は頭より下だけで良いわけです。それは殆どか。
面白いことに、こいつはどうも非分離型の模様。多足歩行は8脚で、橋の上をスライドして超えた後はそれらを持ち上げて二足歩行になる。
二足歩行の脚がどのような機構なのかは映像がなく分からない。
1回戦シードで2回戦から登場したが、セッティングにミスがあったらしくハードル前で橋が出ずリトライ。相手には追い付けず敗退となった。
奈良B ある味覚パイプ(優勝)
今も奈良高専ロボコンプロジェクトのロゴに入っているオオカミ(ニホンオオカミ)のイラストはこのマシンのデザインから来ている。
アグレッシブなイラストのとおりとにかく速い。速すぎてパイロンに当たる。ハードルにオーバーランする。でもリトライしても速い。
ついでに、翌年もそうだが、ちょいダサのマシン名も近畿らしくてgoodである。
なおテーマは絶滅したニホンオオカミが四足歩行から二足歩行に進化するというもの。
オオカミが立ち上がると目が青く光り、遠吠えの音声が流れる。遠吠えの時に頭が持ち上がるなど芸も細かい。
速さのポイントはやはり足回り。特に多足歩行側が群を抜いて速い。3つで1セットの短脚による4脚ステアで、車輪と変わらぬスムーズで高速に走り抜ける。
二足歩行も、比較的大きなリンクの脚を使いつつ体高も高いが、バッテリー等の重心を低く配置しあまり滑らず安定して歩行できるようになっている。
旋回は錘のついたカムをマシン左右で逆方向に回転させている。錘による旋回は機構的に割り切っていて合理的だが、パイロンスラロームではタイムロスになる。
近畿ではそれでもあまり余って圧倒的なスピードだった。しかし全国ではそれでも勝てないと踏み、二足歩行はコの字+ターンテーブルに転換。
タイムは30秒代後半まで縮めていたらしい。
近畿大会1回戦はハードルに橋を渡す時にオーバーランし接地禁止ゾーンに入ってしまったが、素早くリトライし1:09でゴール。
2回戦はノーリトライで44秒でゴール。これが近畿大会最速タイムとなった(準決勝以降はスラロームが追加されるので必然的に長くなる)。
準決勝はスタート直後にパイロンにぶつかりやり直し。しかし大回転中に相手を抜き去り逆転しそのままゴール。
決勝も終始和歌山Aをリードし念願の近畿優勝を飾った。
全国大会に向けて更なるスピードアップを図ってきた。ところが予選のハードル越えの際に前のめりに転倒。オオカミの首ももげてしまう。
リトライ復帰できずゴールもならなかった。
和歌山A すっぱいダーマン(準優勝、全国出場)
2年連続全国準優勝した和歌山のガチチームの今年のマシンがこちら。
近畿大会では奈良に及ばず準優勝だったが、全国に向けてスピードアップし決勝トーナメントにも進んだのはさすが全国常連の実力。
二足歩行のすっぱいダーマンの機構はシンプルなクランクバタバタ方式だが、多足歩行はテオヤンセン機構に近い複雑なリンクを左右1対で動かし8脚で大きな歩幅で歩く。
ただし近畿大会を経てこれでは遅すぎると判断したのだろう。全国仕様では脚の先端を線接地から点接地に変更し、1歩1歩を小さく高速に刻むよう改良し大幅にスピードアップした。
橋と分離の構造も変えてより速く。二足歩行マシンも恐らくほぼ全て作り直されている。布を被ったすっぱいダーマンも、パーカーを着てノリノリになった。
旋回方法は近畿大会では錘を左右にスライドさせていたが、全国では中身が見えずどう変わったかは分からない。
ハードル超えはオーソドックスな橋渡しであるが、多足マシンごと上昇し渡って降りるのはなかなかメカメカしくて良い。
近畿大会1回戦は1:40でゴール。2回戦は山越え後にリトライし相手に抜かれるも、相手のリトライ中に再逆転し二足歩行ゾーン途中まで挽回。判定2-1で勝利した。
準決勝はパイロンスラロームが追加されたにも関わらず1回戦よりタイムを縮め1:16でゴール。
迎えた決勝ではハードル後の二足歩行マシンの分離に時間がかかってしまった。奈良Bには追い付けず準優勝。しかし推薦で全国へ。
全国では前述のとおりかなりの改良が加えられ、予選6位の好成績で近畿勢で唯一決勝トーナメントへ進出した。
ゴール目前でうまく旋回できずかなりタイムロスしていたので、これがなければもっと速かったはず。40秒代は堅かった。
決勝トーナメントは沖縄と対戦。和歌山よりも速い沖縄の多足歩行に追いつくためスピードを上げたままハードルに突入した結果、接地禁止ゾーンに侵入してしまった。
スピードレースでは1つのミスが命取り。ここで敗退となってしまった。
和歌山B 吉宗の動く城(本田技研賞)
8代将軍 徳川吉宗は和歌山藩の出身である。多足歩行の城が二足歩行の吉宗になるというテーマだ。
ハウルの動く城は鳥の脚のようなか細い4脚だが、これも棒状の4脚歩行を目指している。
更にハードル超えにも一捻りし、8本の定加重バネカタパルト方式でジャンプして超えようというアイディア。
Aチームとは違いかなりアイディア重視。Aチームはガチ、Bチームはアイディアという傾向は全国的にも見られるが、この頃の和歌山も既にそうだったのかもしれない。
しかし吉宗の動く城、試合では動くことはできなかった。
大阪A 緑の地球のアースマン(デザイン賞、関西電力賞)
マシン名から想像できるとおり、エコをコンセプトに制作・デザインされたマシン。
外観も大きな地球の形で、中から出てくる二足歩行マシンも足の生えた地球(こう書くと凄いな字面だな)。アースマンだからね。
バッテリーの充電には自転車発電を併用しているという。高専生って突然走り出したり筋トレし始めたりするしね。そういう衝動を自転車に回してもらえれば電気はたまると思います。
大会放送のナレーションでは消費電力も制限の半分に抑えたとされていたが、ルールでは電力量しか規定されていないため、これは電力量の誤りと思われる(電力警察)。
多足歩行マシンはテオヤンセン機構による16脚。二足歩行マシンは体格の殆どを占める巨大な脚をクランクで回して大きな歩幅で豪快に1歩1歩歩いていく。
ハードル超えの時に後方に帯を展開してエコのメッセージを発信するなど、終始コンセプト重視である。
1回戦は2:41で見事ゴール。2回戦は山越え後に二足歩行マシンが出てくるところで転倒しリトライ。
勝利したが、この時に二足歩行マシンが壊れてしまっていたようで、準決勝では二足歩行マシンは本体と脚が分離された状態で試合をしていた。
ハードルは越えられたが、それ以上動くことはできない。悔しさでメンバーはそこで崩れ落ちてしまっていた。
しかし近畿地区でゴールまでたどり着いた4チームのうちの1つなので結果としては上等。デザイン賞と関西電力賞を受賞。
大阪B こなえもん(安川電機賞)
大阪と言えば2009年「ダンシング・カップル」でのオバチャンバラの印象が強烈だが、その前年にもオバチャンがいた。
大阪言うたらたこ焼き。そしてその中から出てくるのはオバチャンである。オバチャンバラのオバチャンはカクカクしていたが、こちらはボールを頭に使っていて丸い。
毎試合ごとにオバチャンの装飾を変えるなど見せ方にもこだわっている。
多足歩行はバナナ状の3脚1セットをクランクで細かく動かしてスムーズに歩行。二足歩行のオバチャンはターンテーブル+コの字型の歩行方式。
1回戦は大回転中にたこ焼きが落ちてしまい、それが引っかかってハードルに橋をかけられずリトライ。相手が動けなかったため勝利。
2回戦は奈良Bとあたり、変身までは行ったがそこで相手がゴールし敗退。来年のオバチャンの活躍にご期待下さい。
神戸A Wake Frog
上で歩行に対応できなかったと書いたけど、多足歩行までは何とかなるんだよなぁ。弧状の足とクランクリンクによる8脚でさしたる振動もなくぬるぬる歩く。旋回もできているし決して悪くはない。
二足歩行は中心に大きな動物の脚のような歩行脚を配置し、もう1脚はそれを取り囲むコの字フレーム。カエルの脚をイメージしているためなかなかごつい。
これで多足歩行マシンからかけられた橋を上を自力で歩いて進むようになっていた模様。
マシンのテーマは名前のとおりカエル。蜘蛛の巣(多足歩行マシン)に掴まったカエルがそこから抜け出し二足歩行マシンとなり歩いていくというストーリーだ。
大会では橋を渡る際に転倒し落下。その際にどこかが破損したのか、動くことができなくなってしまっていた。1回戦敗退。
神戸B SUWAちゃん
SUWAちゃんとは神戸市立王子動物園にいた象の諏訪子のこと。神戸の子供が行く動物園と言えば王子動物園で、象の諏訪子は当然の人気者だった。
しかしこの年の4月に亡くなってしまう。その諏訪子をモデルにしたのがこのマシン。なので非常にでかい。縦方向に高い。
スタート時から直立した象にも見えるが、最初は多足歩行。
二足歩行がどうなるのかは映像が無く分からずじまいだった。
巨大な上州大回転のような機構が直立しているので、これで重心移動してハードルを越えて立ち上がるのだろうか。マシンの形的にはかなり無理した機構だったように思える。
会場入りしてから動かなかったようだが、本番は大回転の途中まで動くことができた。
近大A ゴリラーマン
ラックで伸縮・回転する4つの脚のみによる多足歩行と、そこから立ち上がっての二足歩行を目指したマシン。
極めて難しい挑戦に歩行ルールの初年度に果敢にも挑んだ。さすがに難易度が高すぎてとても二足歩行ができそうな機構までは完成できなかった。
制御も間に合わず、多足歩行もできないと試合後に正直に話していた。
四足歩行から二足歩行にゴリラになるはずだったのだが。
近大B egg
マシン名のとおりコクーンタワーのような大きくカラフルな卵から二足歩行のニワトリが出てくる。
Aチーム同様、歩行機構にはこだわっており、多足歩行マシンは4脚による斜対歩様。
ニワトリは片足ごとに重心を完全に移動させ1歩1歩進むことを目指している。
残念ながら試合ではスタートゾーンから出ることができなかった。
|