近畿大会概要
「人とロボットの協力」というテーマの3年目。
昨年度の「高専生がゴール対象物」というルールはさすがに継続せず、今度は操縦側に大きく手を入れてコントローラ無しでの操縦を初めて義務付けた。
有線や無線での直接的な操作信号のやり取りによる操縦を禁止するというものである。
このため操縦者ではなく伴走者と呼ばれていた。
実際には近接センサに手を近づけたり、磁力センサに磁石を近づけたり、画像センサに記号を見せたり、完全自動操縦で固定経路でフィールドを動き回るようにしたりといった方法がとられた。
近接センサで方向を全て操作するようにしたガチマシンは、コントローラを使った場合とあまり変わらなかったようにも思うが、テーマに沿って色々な操縦アイディアが出てきたのは高専ロボコンの大きな進歩であったと言えよう。
色々なセンサが簡単に手に入る時代になっていたというのも大きい。
人的要素は最初のボールのブレイクショットやボールを拾ってマシンにセットする伴走者の動きに残っているが、ブレイクショットは狙って意図的に散らすことは難しく、ボール拾いも大きなミスは出にくいので、去年ほど大きなプレッシャーは無かっただろう。
2000年代後半は「マシンでストーリーを表現すること」などとルールに書かれていたが、意外なことにこの年のルールには「ロボットは自作の歩行するペット・ロボットとする」と書かれているだけで、特段の装飾の必要性は定められていない。
しかしテーマがテーマであったので、装飾をしっかりしてペットを表現するチームは多かった。
やはり大元のルールのテーマ性が大きく影響するものだ。
翌年、翌々年はルールでコンセプトやキャラクターが要求されている。
この年から田中貴金属グループが協賛に加わり特別賞が設定された。
電気事業連合会の撤退で特別賞は4つになっていたが、これで5つに戻った。
初の田中貴金属賞は舞鶴が受賞。
そして皆さんお待ちかね、今年からロボコンテーマソングにトータス松本の「無我夢中」が使われるようになる。
これまでのテーマソングは青春全般の応援ソングといった歌詞だったが、この曲はロボコンに没頭する学生達の葛藤・苦しみ・挑戦をかなりダイレクトに表している。
もともとトータス松本はロボコンをよく見ており、そこからこの曲を作ったとのこと。
当初はロボコン2012のテーマソングと位置付けられていたはずだが、あまりにもフィットしており評判が良かったのだろう。
翌年以降も使われ、ロボコンのテーマソングとして今も定着している。
番組の最後にこの曲が流れると涙するロボコニストは今も多いとか。
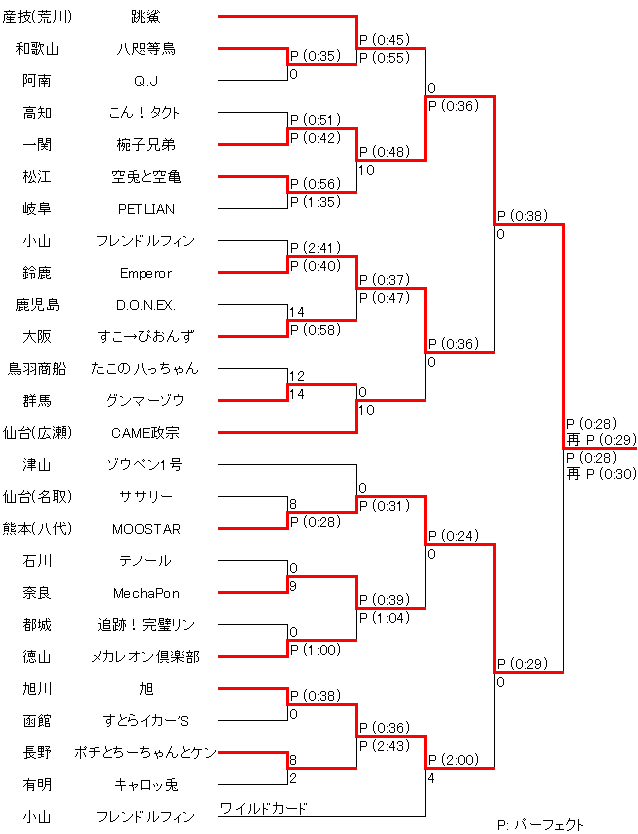
昨年度は奈良が制した近畿大会、今年はまた和歌山が取り返した。
優勝はこれで7回目。なんと7年連続14回目の全国出場だ。この連続記録はまだまだのびて10年まで行く。
昨年優勝だった奈良は準優勝で全国推薦。全国は3年連続11回目。昨年は同校決勝だったで、2年連続の準優賞となる。
この連続準優勝記録も5年連続までのびるのだから、この頃の奈良と和歌山の勢いが良く分かるというもの。
3校目の全国推薦は昨年に続き大阪。つまり全国出場校は昨年と同じ顔ぶれということだ。
大阪の全国は2年連続13回目。
地区と全国でアイディア賞を取るなど大いに活躍するのだが、翌年以降振るわないようになり、6年間全国から遠ざかることになってしまう。
歩行ルールが浸透してきたこともあってか、今年も地区内で歩行出来る出来ないのレベルでの技術的な大きな溝は無かったように思われる。
ちゃんと動きを見せてくれるチームは多かった。
そのような中でも強いチームはひたすらに強く、それ以外との差がやはりあった。
明石Bも普通に強く実力としては上位に食い込んでいたものの全国出場はならなかったあたりに近畿地区のレベルが現れている。
近大は2チーム初戦敗退がずっと続いていたが、ついに6年ぶりに勝利。しかも2回戦も勝利しベスト4まで上がった。
ちゃんとマシンが動いているのでこれは実力。
なお連続初戦敗退記録は神戸が7年ぶりまで延ばすことになる。
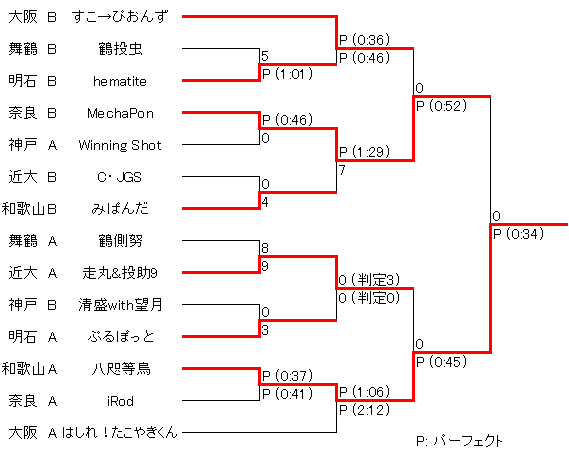
舞鶴A 鶴側努(デザイン賞、田中貴金属賞)
舞鶴なら鶴をペットモチーフにするしかない。やっぱり鶴が来たと思ったら、鶴は発射機構で足元には亀もおる。
2つのWebカメラにマーカーかざして読み取らせ、その方向に動くようになっている。
精度と追尾性はよく、一瞬マーカーを見せるだけでその方向に歩いていく。
細かくマーカーを出したりしまったりするため、伴走者は首から2つ折りのマーカーの板を下げて、出したり畳んだりしている。
ゴールへの発射機構は9つの直線カタパルト。エアシリンダーを使っているようにも見える。
全て一気に発射することも出来そうだが、確実性のためか1列ずつ3個同時に発射するようになっている。
発射前には左右位置を調整しているが、そこにも画像認識を使っているのだろうか。
画像認識を積極的に使ったのはこのチームと近大Bくらいだった。
大会では近大Aと対戦。相手より早くゴールまでたどり着いたがボールは5つしか入らず再度ボールの回収に向かう。
試合は点の取り合いの接戦となり僅か1点差で敗退。
今年から協賛に加わった田中貴金属グループの特別賞を受賞。
舞鶴B 鶴投虫(安川電機賞)
カクトウムシ。カブトムシっぽい響きもあるがモデルはテントウムシ。鶴要素はない。
3つの距離センサで伴走者を追従し、ボールを入れると羽を動かし更には表情を変えて喜ぶ。
発射機構は3つ横に並んだローラー撃ち出し型で、レーザーポインタを見ながら発射台の角度を調整しつつ1列ずつシュートしていく。
この時手をかざして操作するのは四つ葉のクローバーに埋め込まれた近接センサ。世界観をしっかり大切にしている。
試合でもしっかり動いていたが、ゴールに向かう前に相手の明石Bにパーフェクトを決められてしまった。
明石A ぷるぽっと
タコは良い。名物テーマにも、動物テーマにも、ペットテーマにも、食材テーマにもあらゆるところで使える。
マシンには大きなタコ壺とタコが装飾されていて、タコ壺型の3×3発射機構にボールを入れるとタコが脚を揺らして喜び見る者を楽しませてれる。
歩行は多足脚が3つで、画像センサに赤色の板を認識させそれを追従するようマシンが動く。
止めたい時は板を裏返して青色を見せればピタッと止まる。初めての技術だろうがよく出来ている。
ゴール前に着いてからの発射の操作は近接センサで行っている。
発射機構全体の位置を左右にスライドさせて、ゴムパチンコでボールを1つ1つ発射していく。
1回戦は相手より早くボールを回収しゴールへ発射。精度は調整しきれていなかったようで成功は9球中3つのみだったが勝利。
しかし2回戦途中で足回りが破損し、得点できず判定0-3で敗退。
試合後にはタコの中には明石焼き(明石という光文字が浮き出している)がある小ネタを披露してくれた。
明石B hematite(技術賞、本田技研賞)
これ十分全国レベルのマシンだったんだけどなぁ。メンバーも「3年間やってきた中で一番」と自信を見せていただけ本当に惜しい。
某ジョレーの「ここ数年で一番~」はテンプレだが、高専生の「ここ数年で一番」は信用できる。本人達が一番よく分かってるからね。
ペットのモデルはグリフォン。デザインが黒で統一されており、これがマシン名(ヘマタイト:赤鉄鉱)の由来だろうか。
コの字型に配置されたセンサの間に手を入れてマシンの移動やゴールを操作。
ボール回収時とゴール時の両方の操作性のため、センサはマシンの前後両側に付けられている。
ゴールは9つの釣り竿を伸ばしてシュート。
機構の完成度が高いだけでなく伴走者の手つきも慣れており、かなり練習したことが伺える。
1回戦は素早い動きをしっかり見せて1:01でゴール。しかし2回戦は大阪Bの速さに及ばず。
良くできていたのだが全国はならなかった。この手の強さを目指したマシンは勝ち進まないと全国には行けないのが今の近畿地区だ。
奈良A iRod(ベスト・ペット賞)
こういうギリギリネームは明石がよくやるんだが、奈良もこの頃はマシン名にユーモアがあった。
ゴールに対して直線状に9つの釣り竿を伸ばしてゴールするので、フレームがゴールとほぼ同じサイズになっておりかなり大きい。
モデルはしまじろうっぽいがそうではなくヤマアラシ。釣り竿が伸びた時にヤマアラシの棘のようになるのだ。
操作はセンサの前に板をかざして方向移動、磁気センサに磁石の入ったニンジンをかざして発射。
スピードも機構も良くできていたのだが、和歌山Aに4秒及ばず初戦敗退。
可愛いしまじrヤマアラシと完成度でベスト・ペット賞を受賞した。
奈良B MechaPon(準優勝、全国出場)
たれ目のタヌキがなかなか可愛い。しかもしゃべる。機構面だけでなく、装飾やペットらしさにもしっかり手をかけている。
フィールドの壁沿いに固定ルートで周回することを前提としつつ、近接センサで細かい移動調整もできるようになっている。
ただ、大きなマシンかつ壁沿い移動なのでコーナーでの旋回に時間がかかるのがネック。
ボールはゴールとほぼ同サイズのフレームの9個にポケットにセットし、ゴール時にはそのフレームごとゴール真横に伸ばして、ポケットを開いて直接ゴールに流し込む。
フィールドの隅にマシンを位置させた状態からシュートするので、フレームを伸ばすのは右斜め上、もしくは左斜め上とコーナーによって変わることになる。
試合ごとに機構の調整が必要。
近畿大会1回戦は危なげなく46秒でパーフェクト。2回戦はシュートで1つ入らず、リトライしてパーフェクト。その間に相手がシュートしており、これが決まっていたら負けという危ない展開だった。
準決勝の相手は強敵大阪Bだったが、相手がレインボーボール回収に苦戦している間にパーフェクトを決めて勝利。
決勝戦はゴールまで互いにミス無し。
相手よりも早くゴールへ向けてフレームを伸ばしたが、ここから少し時間がかかってしまうのがこのマシンの弱点。その間に相手にパーフェクトを決められてしまった。
しかも1球落としてしまっており自身はパーフェクトを決めれず。課題を残す決勝戦となってしまった。
全国大会では装飾を少なくして軽量化。1回戦はパーフェクトを決められなかったが2回戦は39秒で決めて勝利。
準々決勝の相手は熊本(八代)。ただでさえ速いのに、ブレイクショットのボール配置も相手に味方し、全国大会最速の24秒でパーフェクトを決められてしまった。こればかりは運としか言いようがない。
和歌山A 八咫等烏(優勝)
さすがにウメはペットにならなかったのか、今年はABチームともマシン名に恒例のウメが無い。
日本神話の八咫烏をモチーフにしているが名前はヤタラガラス。
3本脚の八咫烏に合わせてか、このマシンも独立ステアの多足歩行部を3つ三角形に配置している。
いや、3脚だったからこのマシン名にしたのかもしれない。
移動方法はスタート時に4つの固定ルートから選択し、必要時に近接センサで止める方式。
最速を目指すため、移動しながらボールを回収セットできるよう、ボールのセット部分が開放的な構造になっており、色々な方向からアクセスできる。
更にながら伴走者も練習を重ねており、マシンを殆ど止めずにゴールまでまっしぐらで向かっていく。
ボールのシュートは9つ個別に用意されたローラー。ローラーを9セット用意するのも重量的に大変なので、この辺りにも工夫があるのだろう。
近畿地区大会1回戦はいきなり奈良Aと優勝候補同士の対戦。4秒早くパーフェクトを決めて勝利。
2回戦はゴール前でトラブルがありリトライ。発射も2球失敗してやり直したが1:06でパーフェクト。
準決勝も1球外してしまったがこれはすぐに再投してパーフェクト勝利。
決勝戦の相手は奈良B、しかも両者ミスなしの大接戦となった。ゴール前に着けたのは和歌山が早かったが、位置調整に時間がかかり、その間に相手がアームを伸ばす。
しかし発射に入るとこちらの方が早く、大会最速の34秒で見事勝利した。
全国大会では2回戦敗退だったので放送ではダイジェストでしか映らずあまり情報が無い。
パーフェクトを外す映像が映っているので、相手より先行していたにも関わらずその失敗で逆転負けになってしまったと思われる。
和歌山B みぱんだ
みかん箱に入ったぱんだがデザインされている。これはみぱんだ。
事前にいくつかの固定周回ルートが設定されており、それを最初に設定してスタートさせ後は自動で移動。
止めたい時は頭の上のセンサに手をかざして止める。
歩行のアクチュエータは全てエアシリンダー。足を前後と左右に伸ばす機構と、上げ下げする機構にシリンダーが見える。
更にボールのゴールも9本の釣り竿をエアーで伸ばして行うので、56本ものペットボトルをマシンに積んでいる。
1回戦、順調にゴール前まど進んだが止まらずフィールド外周に乗り上げる暴走ぱんだを見せてしまう。
リトライではスタートゾーンから直接ゴール前に向かったので、ちゃんとそのようなルートが設定されているようだ。
ボールを4つ決めて勝利。
2回戦は相手の奈良Bの方が速かったがパーフェクトが決まらずリトライ。その間にゴールまでたどり着いてシュートしたが、エアーが足らなかったのか5球入らず。逆転勝利はならなかった。
大阪A はしれ!たこやきくん
たこ焼きを焼くタコという、よく考えるとブラックなペット。
発射機構が見えないくらい、タコとたこ焼きがこれでもかと大きく装飾されており、タコの脚の動きも滑らか。さすがの関西人だ。
発光部と受光センサの間を団扇で遮ってマシンを操作する。
発射機構は9つのエアシリンダーカタパルト。1つずつ発射してしっかりゴールを狙う。
動きは良く、試合ではリトライした和歌山Aに迫ったが、発射を終える前にパーフェクトを決められた。
大阪B すこ→ぴおんず(アイディア賞、全国出場)
その名の通り、2台のサソリマシンがフィールドを駆け回る。
1台は回収専用なのだが、ボールを取り込むのではなく、フィールド外周の固定ルートを走りながらダクトファンで風を送ってボールを1か所に集めるという全国唯一のアイディア。
マシンが直接ボールに触れて回収するのはルール違反だが、風なら接触していないのでOKなのだ。
走りつつファンの角度は常に変えてもう1台の待つゴール前にボールが転がるようにしている。
伴走者は風でボールが転がるよう送りやすいよう、ルール上問題ない範囲でボールの位置を調整しておく。
この時、伴走者を認識して接触しないように停止するという優秀さ。
また、白い板を使って手動でマシンを誘導することもできる。
伴走者はゴール前に位置取ったもう1台のマシンにボールをセットし、9本の釣り竿でシュート。
近畿大会は初戦シードで2回戦から。相手の明石Bも速かったがしっかりボールを集めて36秒で勝利。
準決勝からレインボーボールを入れるゴールが1つ増えるのだが、これが響いてしまった。
ボールを集める時に1つだけレインボーボールを集めきれず、その回収のためにサソリを誘導して大幅に時間ロス。
その間に奈良Bにパーフェクトを決められてしまった。
近畿大会はここまでだったが唯一無二のアイディアで全国出場。
全国でも独創的なアイディアとして大会放送で紹介された。
初戦は鹿児島 D.O.N.EX.に勝利したが、2回戦は鈴鹿 Emperorに数秒及ばず。ボールの回収の動きに差が出てしまった。
しかし全国アイディアは本当に見事。
なお上記のトーナメントは大会直後の公式サイトの情報(今はサイトリニューアルに伴い無い)を基にしているが、実際の試合を見ると鈴鹿の数秒後に大阪はパーフェクトを決めている。
10秒も差は無いはずなのだがここは公式情報に従った。タイマーは人力なので、止めるのを忘れていたとかだろうが。(別の年でもたまにある)
この年の大阪はマシンの完成が非常に速かったよう。なんとダミーマシンまで作っていたという情報もある。
自分が見たわけではなく、当時の関係者情報なので何のダミーかなどの詳細は書かないが、それだけの余裕があったということ。
そして、大会までアイディアを秘匿しておきたかったのだろう。
神戸A Winning Shot(マブチモーター賞)
ヒヨコがモチーフで、黄色のプラ段ボールを使うなど全体的にカラーを統一している。
近接センサに団扇を近づけて操作。発射機構は3列のローラー。
テストランでは歩行も旋回も出来ていたようなのだが、試合ではスタート直後に部品が破損し殆ど動けず。
ボールの装填部分の調整も間に合っていなかったようなので、やはり今年も全体的に完成度を上げられていなかった。
神戸B 清盛with望月
その年の大河ドラマが地元の学校はそれをテーマにしたマシンを作るのが高専ロボコンの定番。
2012年の大河ドラマ「平清盛」の主人公 平清盛が設立した福原京は現在の神戸市だったため、神戸では清盛キャンペーンがあちこちで展開されていた。(あまり良いイメージで語られることが少ない人物のため、ドラマ共々あまり盛り上がらなかった)
なかなか大河は地元に回ってこないものだが、神戸にも来たのだからそりゃマシンにも絡めるよな。
望月は清盛が駆った馬の名前で、マシンにも馬に乗った武者が装飾されている。
伴走は超音波センサに軍配を近づけて行うなど芸が細かい。
歩行は4足歩行で、旋回時は中心のターンテーブルを設置させて回すようだ。
ボールのゴールは3門横に並んだローラー型の撃ち出し機構で角度を変えながら発射していく。
試合では歩行機構はスムーズに動いていたのだが、旋回がうまくできずゴール前までたどり着けなかった。
どうも旋回のところだけセンサの反応が悪かった模様。
近大A 走丸&投助9(東京エレクトロンFE賞)
近畿地区では2チームしかなかった分離型の1つ。
回収専用の犬マシンを近接センサで追尾操作しつつとフィールド上のボールを回収し、その間に発射専用マシンがゴール前に移動し待機。
回収されたボールはゴール前にばらまかれ、後は伴走者がそれを1つ1つ発射マシンの9つのローラーに投入。
大阪Bも分離型だがここが少し違う。
高速パーフェクトには向いていないが、シュートに失敗したゴールをその場で見てやり直せるのは便利だ。
1回戦では舞鶴Aと点の取り合いになり、失敗したゴールをその場で判別し再シュートできる特長が功を奏し勝利。
2006年「ふるさと自慢特急便」以来2チームとも初戦敗退が続いていたが、ついに6年ぶりに勝利を手にすることができた。
しかもマシンが思い通りに動いて、アイディアの特長を発揮しての勝利。これには喜びもひとしおだっただろう。
2回戦も順調にボールを集めたがゴール前で2台ともリトライ。犬がボールを出してくれず、発射マシンはゴール前からまたスタートゾーンに戻ろうとする。ダブルのトラブルで得点はならなかったが判定3-0で勝利。
6年ぶり勝利だけでなくベスト4まで進む嬉しい展開だったが、準決勝では和歌山Aの速さに及ばなかった。
近大B C・JGS
去年に続いて今年もオオサンショウウオがデザインテーマ。
櫓型の非常に大型のマシンで、ゴール時にはゴール機構を高さ3m以上に上昇させ、釣り竿のレールにボールを転がしてゴールへシュートする。
重量の制約か、このレールは5つしかなく、パーフェクトは出来ない仕様になっている。
一方で制御は非常に手が込んでいる。マシンにはノートPCを積んでおり、3つの距離センサで伴走者を追従。
ボールを入れるとPCの画面でにオオサンショウウオの喜ぶ表情が表示される。
ゴール時にはカメラに巻物を見せるとそれを認識して自動でシュートされるのだが、この巻物に書かれているのが「ぼくたちここでおわかれだね・・・ここからはひとりでがんばってネ」という非常に悲しい内容。
ペットとはいえ本来住む世界が違うので別れなければならないというなかなか重いテーマを表している。
試合では追尾がうまくいったりいかなかったりでゴールまで至れなかった。
試合後のデモではしっかり動いていたので、環境的な調整要素がまだあったのだろう。
|