近畿大会概要
ロボットが飛ぶというのは、例えジャンプであっても非常に難しい課題である。
1999年「Jumpt to the Future」で初めてジャンプがルールに出てきた時は、大会が成立しないことが懸念される阿鼻叫喚の様相であった。
10年後の2009年「ダンシング・カップル」でもローリングジャンプがあったが、これはルールの課題の中の必須事項ではなかった。
そして今年は、縄跳びで連続ジャンプが求められるという高度なルールとなった。
「人とロボットの協力」という大テーマも継続しており、縄の片側を人が回し、人も縄跳びする。
ロボットの操作方法は昨年と同様コントローラー無効だが、ロボットのアクションが定型化されているので、去年ほど新しい方法を模索する必要は無かったのではないかと思われる。
ジャンプするタイミングをどう決めるかがポイントだっただろう。
昨年はルールでテーマ性は求められていなかったが、今年はマシン全体でのコンセプトやストーリーが要求されている。
また、縄跳びという動作は単体でもエンタメ性があるので、大会終了後は色々なイベントに駆り出されることとなった。
これはじゃんぺんなどの一部の全国機だけでなく、飛べるマシンは他も同様だったのではないだろうか。
近畿地区には「あいつ」がやってきた。
あまりに速く、あまりに正確で、あまりに飛び続ける。あまりにも強い。ついた呼び名が「青い悪魔」。
後にジャンプロボットのギネス記録も打ち立てた奈良 じゃんぺんである。
近畿地区の時点でも鬼神のごとき強さだったのに、全国大会で更に高速化され悪魔的な強さを誇った。
ついに近畿地区初の全国優勝を遂げるかと思われたが、決勝ではトラブルでまさかの敗退。
近畿地区としては6回目の決勝戦、またしても優勝には届かなかった。
大会結果としては奈良Aが2011年「ロボ・ボウル」以来2年ぶり2回目の同校決勝を制し優勝。
奈良Bも大賞狙いに相応しいパフォーマンスを見せShall We Jump賞に輝いた。
強い強いと言われる奈良だが、テーマ賞の受賞は2年連続で、強さだけではないことを記録上も示している。
ベスト4は2チームとも和歌山で、近年の近畿地区の奈良・和歌山2強状態を表した形となった。
全国推薦は和歌山Aと明石A。和歌山は8年連続15回目の全国出場。明石は8年ぶり5回目だ。
神戸は地区止まり連続10年、2チーム初戦敗退を6年にまで伸ばした。
これで翌年があんなことになろうとはだれが想像しただろうか。
余談ではあるが、この年の司会・リポーターは前年の2012年と変わっていない。
舞鶴A トブリン(アイディア賞、本田技研賞)
マシンが上方向に移動する課題では必ずプロペラを使ったマシンが出てくるものだが、やっぱり今年も出ました。ロボコンはこうでないと。
6つのプロペラがうねり声をあげて回転する。マシン自体は10kgあり、これを完全に浮かせるわけではない。
ジャンプ自体はシリンダー機構で飛びあがり、滞空時間を長くとり着地の衝撃を和らげるのにプロペラの揚力を活用している。
ジャンパーロボットはUFOモチーフとのことだが、UFOというコンセプトが先なのか、プロペラを備えたマシンの形が先なのか。
対応する縄回しロボットは宇宙人だ。
試合では縄跳びはできなかったものの、試合後のデモでふんわりジャンプを披露してくれた。
舞鶴B GO舞WAY!(田中貴金属賞)
1997年「花開蝶来」以来16年間に渡りマシン名に「鶴」を使ってきた舞鶴であるが(TSURUの年もあった)、今年ついに終焉の時を迎えた。
といっても翌年からまた復活し2023年現在も続いている。
鶴の代わりに舞の字を使用。マシン名からも、これまでのマシン名の伝統には縛られないという意志を表しているかのようだ。
マシンのテーマはサーカス。ピエロの縄回しマシンが回す縄を犬型のジャンパーロボットが飛ぶ。
この犬ロボットが実にリアルでよく出来ている。4本脚で足を曲げてゴムのエネルギーを貯め、解放してジャンプ。
ジャンプの仕方も、まず前足を上げて上体を起こしてから後ろ足でジャンプすることで、縄が前から通りやすくなっているだけでなく本当に犬が前にジャンプしているかのような動きになっているのだ。
ただジャンプごとに足を曲げてタメる時間が長くかかって、しかもひたすらジャンプし続けるようになっていたため、縄回しのタイミングを合わせるのが難しかった(非常にゆっくり回さなければならなかったがそれでは縄が落ちてしまう)。
試合ではジャンプ課題をクリアすることはできなかった。
明石A ポール&マッカーロニー(デザイン賞、全国出場)
2005年「大運動会」での優勝以来7年間全国から遠ざかっていた明石がついに再び全国へ。
去年も良くできていたのだが勝ち進めず悔しい思いをした。
しかしこのマシンはそれをバネにした戦闘タイプではなく、世界観をしっかり表現したもの。
マカロニペンギンのジャンパーロボットと、ポーラーベア(ホッキョクグマ)の縄回しロボットからこのマシン名が付けられた。
このペンギンとポーラーベアの人形は非常に力を入れて作られている他、ジャンパーロボットを距離センサで操作するための衝立にも極地の氷の世界が描かれていて世界観を表すのに一役買っている。
衝立からは板の付いた棒が伸びていて、縄の位置に合わせこの板を手動で立てることでジャンパーロボットが飛ぶタイミングの指示を与えている。
足回りは独自開発で高速歩行を実現し、ジャンプも最大40cmほど飛べるなど、デザインだけでなく個々の機構も良くできていた。
しかし個々だけでなく全体を通して動作させられなければ課題をクリアできないのがロボコン。
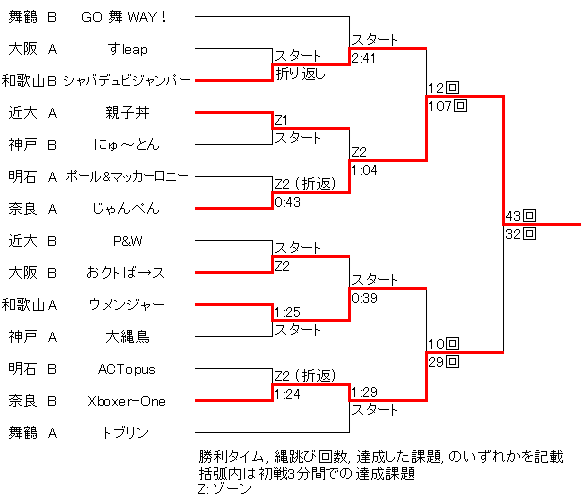
更に近畿大会では初戦の相手に奈良A じゃんぺんが当たってしまい、折り返しまでは行って一定の完成度は見せたものの試合は1分未満で決められしまった。
世界観の実現に力を注いだ納得のデザイン賞と一定の完成度が評価され、8年ぶりの国技館へ。
残念ながら全国放送ではダイジェストにされてしまったが、そこを見る限りスムーズに安定してジャンプ出来ているのでかなり完成度は上がっていたようだ。
明石B ACTopus(安川電機賞)
タコのジャンパーロボットとイカの縄回しロボットによるヒーローと悪の戦い。
明石高専なので当然タコがヒーロー側である。とはいえ悪役のイカもサングラスをかけて小さな牙を覗かせる程度でなかなか可愛らしい。
タコはモーターでバネにためたエネルギーを解放しジャンプ。縄回しロボットの底面が光るようになっており、それを受光してタイミングを合わせてジャンパーロボットが飛ぶ。
インタビューでは前日まで全然動かなかったと言っていたが、試合ではジャンプ自体はしっかり連続で飛べており、ルールの課題はクリアできていた。
しかしマシンの完成度が上がりきっておらず、ゾーン2までクリアしたところで相手の奈良Bがゴールし敗退。
奈良A じゃんぺん(優勝)
可愛いふわふわ質感のペンギンの見た目に惑わされるな。こいつはガチ中のガチのマシン。本気をマジと読むタイプのやつだ。
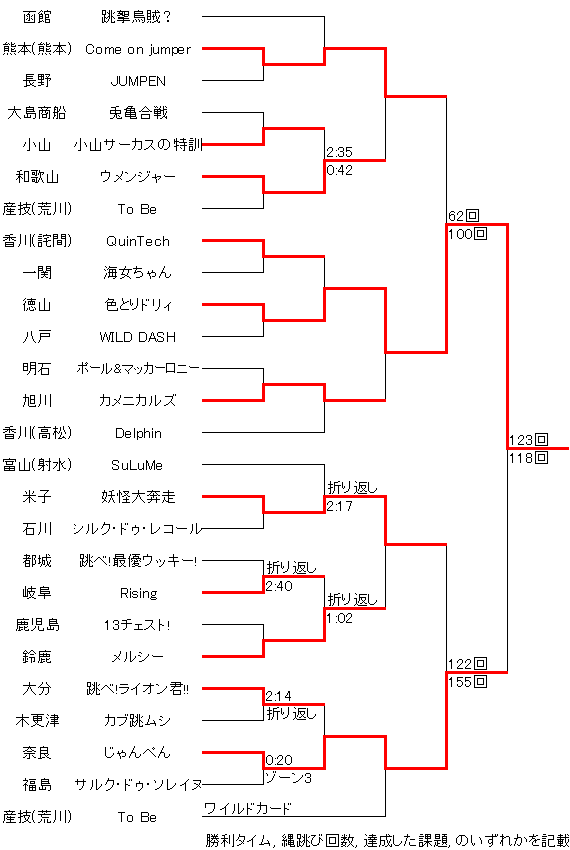
近畿大会前の練習の時点で最大138回のジャンプを成功させており、近畿大会では地区大会最多となる107回のジャンプを記録。
更に全国大会でも最多の155回を飛んだ。
ジャンプ回数だけでなくスピードもあり、全国大会1回戦は僅か20秒で全ての課題をクリアして試合を決めてしまった。
トーナメント表を見てもらえばわかるが、これらの性能は近畿大会も全国大会も通じてダントツである。
あまりの強さに「青い悪魔」「瞬殺ペンギン」などと呼ばれ、当然優勝候補の筆頭だった。
4 m/sで爆速走行する強化プラスチック製多足歩行機構、バッテリーの限り安定して連続で飛べるオフセットスライダクランクのジャンプ機構、縄の位置を検出してタイミングを合わせるセンサ、陰に隠れがちだがジャストタイミングでしっかり回せる縄回しロボット、そして練習を積んだ縄回しメンバーと操縦者。
ジャンパーロボットが細かく位置や角度を調整していることから、操縦者の持つ衝立をしっかり認識して距離を調整していることが分かる。
更に付け加えるなら、可愛いペンギンの装飾も。あの柔らかい質感は綿らしい。
全てのレベルが高水準に達していた。
近畿地区大会、1回戦では圧倒的なスピードと安定性で43秒で勝利し会場の度肝を抜く。
2回戦は連続ジャンプでセンサーが反応せずリトライしたものの1:04で勝利。
準決勝から連続ジャンプに制限がなくなる。リトライ無しで連続ジャンプに入り、107回を飛んだところで縄がマシンに引っかかって停止。これが全地区大会最多記録となった。
奈良同士の決勝戦、なんとゾーン3で縄が引っかかってリトライが立て続けに発生。相手より遅れて連続ジャンプに入ることとなったあげく、19回で一度引っかかってしまう。
しかしジャンプも速い奈良Aは諦めずここから怒涛の巻き返し。試合終了目前まで飛び続け43回で逆転し優勝。危ないところだったが地力を発揮し見事優勝を遂げた。
全国大会に向け、マシンの改造だけでなくメンバーの動きも更に無駄なく突き詰められた。
初戦は福島をなんと20秒で瞬殺。2回戦は大分を、準々決勝はワイルドカードで復活した関東甲信越地区優勝チーム産技(荒川)を撃破。
準決勝の相手は地区大会で和歌山Aよりも速い30秒でのゴールをマークした中国地区優勝校の米子。
それでも全国に向け悪魔化されたじゃんぺんの敵ではなく、相手がまだ折り返しゾーンにいる頃に連続ジャンプに入る、と思われたが通り抜けジャンプで縄が引っかかっておりリトライ。
残り時間1:38、相手は連続ジャンプを既に44回飛んでいる状態でじゃんぺんも連続ジャンプに入った。
これはだめかと思った観客も数十秒経って異変に気付く。奈良のカウントが物凄い勢いで増えて米子に迫っているのだ。全国仕様のじゃんぺんは1秒に2回飛ぶことができる。
米子が122回で引っかかった時、奈良は110回まで追い上げていた。そして残り時間23秒で逆転。そこから時間いっぱいまで記録を伸ばし155回で勝利。
リトライがあってこれなので、無ければ優に200回は越えたであろうことは想像がつく。
そして1994年のスターキング以来、奈良として19年ぶりに上り詰めた全国決勝戦。200回越えでの勝利を目指したが…。
リトライ無しで残り時間2:20で連続ジャンプに入る。相手の徳山が入ったのは残り1:50で、その時奈良は40回飛んでいた。
そこから回数を伸ばして118回を飛んだところで縄が引っかかってしまった。センサのトラブルだ。すぐにまた連続ジャンプに入るが、ミスなく飛び続けた徳山が残り時間4秒で逆転。
予想だにしなかった結末。これがロボコンなのだ。しかし他を圧倒する全国大会最速タイムと最多ジャンプ数は強く記録と記憶に残るものとなった。
じゃんぺんは大会後も色々なイベントに参加している。
2014年4月26日から5月9日に行われた北米への高専ロボットツアーに参加(小山 フレンドルフィンも参加)し、コロンビア大学、マサチューセッツ工科大学などの大学を巡ってデモを披露した。
2017年4月29日~30日に行われたニコニコ超会議2017では超ロボコンステージに登場しデモと展示を行った。ここでは小山 小山サーカスの特訓、大分 跳べ!ライオン君!!と共に「1分間に最も多くロボットが縄跳びを飛んだ回数」というギネス記録に挑戦。106回でギネス記録に認定された。
正式には"Most skips by a robot in one minute is 106 and achieved by Jumpen (Japan)."
なおこの記録は現在はリコーが製作したロボットPENTA-Xの170回(2022年3月5日)が認定されている。
奈良B Xboxer-One(準優勝、Shall We Jump賞、マブチモーター賞)
奈良はAチームが全国優勝を目指すマシン、Bチームが大賞を目指すマシンという傾向があったのは少し前にも書いたとおり。
大賞狙いと言っても奇抜なコンセプト一辺倒ではなくしっかりした得点力を備えるのが奈良。
特にこのボクシングの師弟関係をテーマにしたXboxer-Oneのチームは、同校決勝まで駆け上がる強さを持ちながら、毎回コンセプトのパフォーマンスを見せる芯の強さも併せ持っていた。
ジャンパーロボットは人間の上半身を模したボクサー。頭と両腕が稼働し、トレーナーの掛け声とともにパンチを繰り出す。
動く前にはトレーナーの方を向くなどボクサーのリアルな動きを再現しており、更には奥義も文字通り飛び出す。
これらの動作はルールの課題クリアには全く影響しない。にも関わらずこの完成度。コンセプトの実現に相当力を注いでいることが分かる。
当然ジャンプも難なくこなす。音からしてジャンプにはエアーを使っているようだ。
近畿大会では1回戦、2回戦と安定した試合運びで勝利。操作する前には顔を見合わせてゴーサインを出し、折り返しゾーン手前では、左右パンチの指導パフォーマンスが入る。これは余裕ではなくコンセプトのなのだ。
準決勝ではスピードで勝る和歌山Aに後れを取ったが、安定した連続ジャンプで挽回。29回ジャンプで勝利した。
そして決勝戦でもタイムロスは気にせずトレーナーパフォーマンスを披露。それでも相手のトラブルもあり先んじて連続ジャンプに入り32回を記録。
この時点で相手は19回で引っかかっていたが、そこから巻き返され試合終了。Xboxer-Oneは準優勝となった。
決勝後、まだ見せられていなかったパフォーマンスを披露してくれた。本当なら優勝後に見せるはずだったロボットボクシングの奥義伝授。
「右パンチ!左パンチ!そして最後に、ロケットパンチ!」
勢いよく放たれたロケットパンチの放物線に会場はどよめき拍手を惜しまなかった。
あわよくば近畿優勝もできた性能を持ちながら、最後までコンセプトを魅せたこのチームこそテーマ賞(Shall We Jump賞)に相応しく、高専ロボコンの精神というものを改めて強く示したと言えるだろう。
和歌山A ウメンジャー(技術賞、全国出場)
すっぱいダーマン、ウメンライダーW、ウメトラマンなどを送り出してきた和歌山の最後のヒーローマシンはウメンジャー(2023年現在、ヒーローモチーフはこの年以降登場していない)。
メンバーがレッド・ブルー・ブラック、マシンがイエローとグリーンのヒーローに扮する。
和歌山のヒーロー装飾は御馴染みかつ完成度が高い。これも受け継がれている技術なのだろうか。
ジャンパーマシンは移動用と連続ジャンプ用で2種類のジャンプ機構があるのが特徴。
ゾーンごとの2回ジャンプでは斜め前に大きく飛ぶようになっており高速化を狙っている。
恐らくマシンではジャンプのタイミングは計っておらず、固定で飛ぶのに合わせて縄をうまく回しているものと思われる。
ジャンプはエアシリンダーを使用。連続ジャンプがあるのでタンクの数はかなり多い。
エアーは連続ジャンプ数を制限してしまうということは当初から言われていた。
当然全国を想定していたはずの和歌山が、全国大会ではどの程度のジャンプ数の戦いになると考えていたかは気になるところ。
近畿大会1回戦、各ゾーンのジャンプはスムーズに進めたが最後の連続ジャンプが動作せずリトライを挟んで勝利。
2回戦はリトライなくスムーズに進んだ結果、0:39で5回ジャンプを成功させ奈良Aを上回る最速タイムでゴール。
準決勝も相手よりはるかに早く試合を進めたが連続ジャンプ開始時にリトライ。
その後もすぐに引っかかってしまってリトライが続き、試合終了まで飛んだ10回が記録となった。相手の29回に及ばずここで敗退。
技術賞で全国大会へ進むこととなった。
大会放送の映像で見る限り全国大会に向け全体的に作り直されたように見える。動きにも無駄が無くなった。
1回戦は関東甲信越地区優勝校の産技(荒川)に勝利し、2回戦でも関東甲信越の小山を42秒で制した。
準々決勝で熊本(熊本)のCome on jumperに敗退。大会放送ではダイジェストすら無く完全に飛ばされたのでどのような試合だったのかは不明。
和歌山B シャバデュビジャンパー
魔法使いが縄を回し、ドラゴンが飛ぶ。魔法使いのモデルはどう見ても仮面ライダーウィザード(2012年~2013年に放送)。
和歌山はAチームがヒーロー物を毎年取り入れているが、今年はBチームもしっかり入れ込んでいた。
出場メンバーも黒いローブを着て合わせている。
ジャンパーロボットは近接センサでトリガをかけると固定で進んで決められた回数ジャンプするようになっている模様。
1回戦は1度縄に引っかかってしまったが、その後は順調に飛んで折り返しゾーンまで到達。
2回戦は大きなトラブルなく課題をクリアしていき2:41でゴール。
準決勝の相手は奈良A。練習でもできなかった好タイムで課題をクリアし、連続ジャンプは12回を記録。
これも練習からするとかなり良い結果だったようで、敗退は悔しいもののマシンの結果にはメンバーも満足していた。
大阪A すleap
今年のルールはコンセプトが要求されている。そこに「なかなか寝られない人の横で縄を飛ぶヒツジ」というテーマを持ってきた。
なかなか寝られない人が縄回しロボットというのもシュールな光景(横になった人が置かれている)だ。
しかも近畿大会唯一のダブルタッチで縄回しをするのだからマシンテーマの割りに挑戦的である。
ダブルタッチで飛べば1度のジャンプで2回ジャンプをクリアしたことになる。
ジャンパーロボットは勿論ヒツジ。ジャンプ用と思わしき大きなスプリングが4つ付いているのが見える。
完成しきれていなかったようで、試合ではスタートゾーンから殆ど動けなかった。
試合終了間際にダブルタッチだけでも見せようと、縄を回してメンバーが飛んでいた。
大阪B おクトば→ス(東京エレクトロンFE賞)
今年も出ました大阪のおばちゃん。大会放送でも「出ました大阪のおばちゃん」と言っているので最早近畿の共通認識なのだ。
派手な服装のおばちゃんが縄を回してタコのジャンパーロボットが飛ぶ。
タコ焼きを焼く時に串で回転させるのを縄回しに見立てるという何とも高度なコンセプトである。
あまり見ることができなかったが、試合が進むごとにタコがタコ焼きになっていくというギミックも用意されていた。
縄回しロボットにタコ焼き屋の看板で付いていて、ありがちなタコのイラストや「味自慢」と書かれているのが実にリアル。
特徴的なのは、通常、縄回しロボットと人はコースの両サイドに配置するのに対し、このチームはコースの縦方向に配置し縄跳びをするということ。
その方がジャンプしながら進むのに無駄が無いと考えたのだろうが、放送では特段の説明は無かった。
1回戦ではうまくジャンプを披露しゾーン2まで進んで勝利。2回戦ではジャンパーロボットがうまく動かずスタートゾーンから出られなかった。
神戸A 大縄鳥
全チーム中最小クラスの超小型ジャンパーロボット。これで本当に動くのか?と思うほど小さい。
しかしテストランではしっかり縄跳び出来ていた。(恐らく)ジャンパーロボットがピピッと音を出し、それに合わせて縄を回すことでタイミングを取っている。
6脚歩行も滑るようにスムーズでマシンが全くブレない。速さだけならじゃんぺんとタメ張れるのでは?移動の制御も出来ている。
装飾も軽量・最低限だが、マシンが小さいので十分に鳥を表現出来ていて無駄もない。
勝ちから遠ざかって久しい神戸。
うまくアイディアを形にしきれないチームはマシンが大型化することが多いが、しっかりコンセプトを固めてやる事を絞れていることが分かる。
モーターが壊れて大会では全く動けなかったが、今思えば来年の復活劇は決して運や偶然などではなかったのだろう。
神戸B にゅ~とん
ジャンパーロボットは重力に逆らって飛ぶ豚。にゅ~とんの「とん」が豚ということだ。
縄回しロボットが回すアームの反対側に黄色い板が付いており、これをジャンパーロボットが識別してジャンプのタイミングを計って飛ぶ仕組みになっている。
ジャンプはラック・ピニオンでマシンを浮かせ落とす方式のように見える。
試合ではこの板の識別によるタイミング合わせはうまく出来ていたものの、肝心のジャンプの機構が非常にシビア(宙に浮いている時間が僅か)で縄跳びはクリアできなかった。
近大A 親子丼
マシン名でジャンパーロボットと縄回しロボットはもうお分かりかと思う。
親のニワトリが縄を回し、子のヒヨコがジャンプする。このヒヨコがニワトリよりも巨大で、全14チームの中でも最大クラス。
しかし大型のエアシリンダーで高くジャンプしていてなかなか豪快。
1回戦では縄が何度も引っかかってしまったが終了間際に成功し勝利。
2回戦もジャンプはできたが相手は奈良の青い悪魔。ゾーン2まで進んだところで敗退となった。
近大B P&W
P&WとはPig and Wolfのこと。モチーフは3匹の子豚なのだが、このチームの豚と狼は仲良し。
豚(3匹ではなく1匹)が縄を回して狼が飛ぶ。
ジャンプのタイミングを合わせるのにトーン音を使っているのが特徴的で面白い。
縄回しロボットが縄の特定の2つの角度でそれぞれ異なるトーン音を発する。
ジャンパーロボットはこの2種類の音を連続で聞いた場合にジャンプするという工夫がされている。
挑戦的なマシンだったが、試合ではジャンパーロボットが飛ぶタイミングが合わず課題をクリアできなかった。
試合後のデモンストレーションでは縄のタイミングに合わせて飛んでいたので、試合中はトーン音が騒音にかき消されてしまっていたのだろうか。
|