全国大会&近畿地区大会結果
|
ルール
2足歩行のオフェンスロボットがチームメンバーから受け取ったボールをチームメイトの学生に向けてパスしキャッチが成功(タッチダウン)するまでのタイムを競う。
競技は1分30秒ごとの攻守交代制。ディフェンス側はディフェンスロボットを操縦しパスを阻止する。パスを阻止してボールを取ると相手の競技時間が30秒減る。ディフェンスロボットの足回りは歩行に限らない。
操作するロボットは分離不可。リトライ回数は制限なし。
マシンの操縦は無線(ZigBee・Bluetooth・無線LAN・ホビーラジコン用)・赤外線・可視光・音波による遠隔操縦。
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
近畿大会概要
この年のルール「ロボ・ボウル」は高専ロボコンの中でも異色と言えよう。
昨年度から始まった「人とロボットの協力」というテーマを更に推し進め、試合内容への人の依存性が非常に高くなっている。
これまでもマシンの操縦者という形で人の関与は当然あったわけだが、マシンへの得点物のセット(ボールの投げ入れ)だけでなく、得点対象であるゴールが高専生自身なのはかなり違う。
実際、ボールの投げ入れに失敗したり、飛んできたボールを取れず落としてしまいタッチダウンが成功しないことも多々あり、マシンが良くても試合に負けるケースは発生した。
高専生にこんなスポーツじみたことをさせるとは本当に人の悪いお方ぞ。
そして、先攻・後攻の交代制対戦という試合形式も高専ロボコン唯一(2024年現在)。
二足歩行ルールは継続しているが、他のルールと比べると歩行の必要性が低いルールであり、ポイントとなるアクションもボールを投げるだけ、とかなりシンプル。
モデルとなったアメフトが日本では馴染みが薄いことも相まって、近年と比べるとかなり浮いたルールだったという印象がぬぐえない。
アクションがシンプルかつパスのタイムで勝負が決まるので、どうしてもマシンのアイディアが画一化しがちなルールだった。
この年の3月に発生した東日本大震災による東北地区各校への影響を考慮し、他地区と差が付きにくいようできるだけシンプルなルールにしたという説もあるが、ルール発表が例年通りゴールデンウイーク前なので、震災を受けての急な変更は無かったのではと推測する。
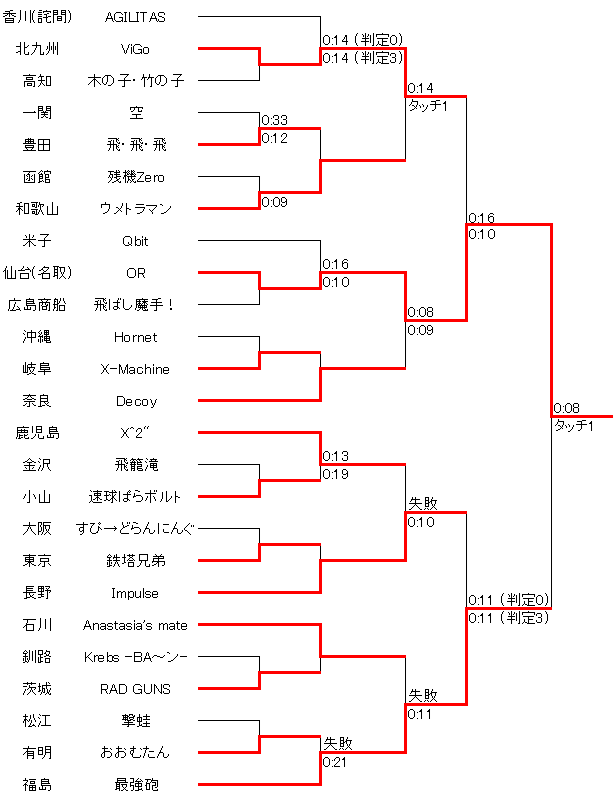
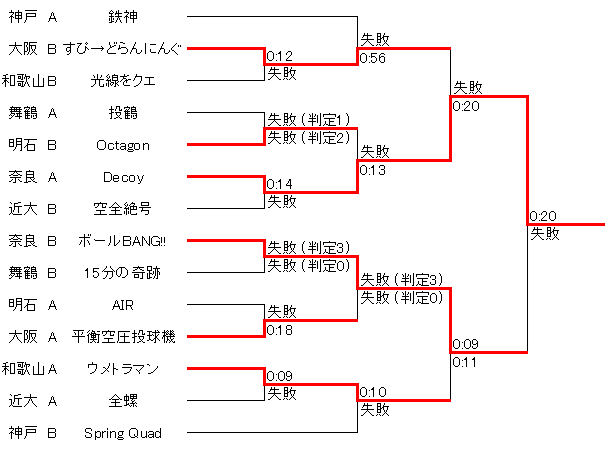
近畿大会出場マシン2007年以来4年ぶりに大会テーマソング ガガガSP「燃やせ!!」が設定された。 「無我夢中」ほどダイレクトではないが、タイトルから想像できるとおり青春の活動には向いた歌詞となっている。 これも2007年と同様にこの年のテーマソングという位置付けだったようだ。 翌年の2012年からトータス松本の「無我夢中」が登場し定番化する。 近畿地区大会は奈良が1996年の明石、2006年の大阪以来の近畿地区3例目の同校決勝を実現し優勝。 奈良の全国出場は2年連続10回目だ。 この頃は既にベスト4以上の7割程度は奈良か和歌山ということが常態化しており、これは2016年頃まで続くこととなる。 和歌山は推薦で6年連続12回目の全国大会出場。準決勝で敗れたが、今年も近畿大会最速タイムを出しており優勝は十分に圏内だった。 推薦もう1校は大阪で2年ぶり12回目。 舞鶴は全国大会連続出場が4年で止まってしまった。去年まではテーマに沿いつつ強さも見せていたが、ルールの方向性が変わった去年あたりから勢いがなくなり、今年から3年間は2チームとも初戦敗退を続けてしまう。 歩行ルールの中では比較的シンプルなテーマだったためか、完成しきれていないというチームは例年より少なめだった。 しかしそれでも強豪チームとそれ以外の差は大きく、舞鶴、明石、神戸、近大などには苦難の時代が続く。 余談ながら、読み仮名無しでは読めないキラキラマシンネームは昔からよくあったものの、この年の近畿地区の難読ネームの集中ぶりは群を抜いていた。 例年はあったとしても数台なのだが、今年は半数近くが普通には読めない。 投鶴、15分の奇跡、AIR、光線をクエ、平衡空圧投球機、全螺…貴方はこれらの読み方が分かるだろうか。
舞鶴A 投鶴
いつもなら「トウカク」と読むところなのだが…これは「スローツール」。ずっとカクだったのに。
このマシンが面白いのは、ボールを投げる際に2つの投擲機構が左右下に展開し、地面に付いたところで発射されるところ。
相手のディフェンスロボを避けつつ、重心が低く安定した状態から撃ち出そうというアイディアだろう。
投擲機構は定加重バネによる直線カタパルト方式。
六角形のディフェンスロボットは切り込みの入ったネットを高く上げて防御。切り込みがポケット状になっていて、ボールを絡め取るようになっている。
是非とも試合で投げるところを見たかったが、テストランから遠隔通信が途切れることが多かったようで、途中で動かなくなってしまった。
舞鶴B 15分の奇跡
読み方は「クォーターオブミラクル」。試合時間は15分もないのだが…元ネタは同名の映画だろうか。
オフェンスロボのスタート時の高さは何と約3m。
それが倒れ込んでキャッチゾーンに入り、そこを起点にスタートゾーン側を縦に起こして二相歩行扱いでの移動を一気に達成しようというアイディア。
起こした後は最上部のバネカタパルトで高い位置からディフェンスを超えてボールを投げる。
ディフェンスロボは高さ5mの風船を含まらませてガード。
面白い発想だがオフェンスロボは完成しきっておらず、試合では操縦者もメンバーも一切操作しなかった。
明石A AIR
「クウキリキガク」です。いいですか。「エアー」ではありません。これは絶対読めない。
今年の明石はAチームもBチームも空気を積極的に使っている。正確には2年前からと言うべきか。
なんと自作の大型エアシリンダーでボールを発射しようというもの。
歩行マシンなのに高さは2.5mもある。そのうち脚だけで1m近くあるので、できるだけ高いところから撃ちたいということなのだろう。
ディフェンスロボットも空気で釣り竿シートを上げるに留まらず、高さが足りない時のため自作エアシリンダーでマシンをジャンプさせようとしていた。
重量オーバーでこの機構は外さざるを得なかったが、テストランでジャンプさせており、かなりこだわりがあったようだ。
やはり重心が高すぎて試合でも歩行が安定せず転倒寸前で支えてリトライでタイムアップ。
明石B Octagon(アイディア賞、安川電機賞)
明石は昨年度もエアシリンダーで一風変わった歩行機構を作ったが、今年も変わり種を作って来た。
なんと脚をホバークラフトにしてマシン全体を尺取虫のようにうねらせて移動する。これもれっきとした二足歩行だ。
ディフェンスロボットにも空気を使っており、2本の釣り竿を空気で伸ばして5mの高さまでネットを展開する。 面白いアイディアだったのだが遠隔通信か回路に問題があったようで1回戦では殆ど動けず判定2-1で勝利。 2回戦ではちゃんと動いて歩行を見せていたが、審判は地面に顔をこすりつけるようにして脚と地面の接触を厳重確認。 一瞬触れてしまったようで、歩行不成立と判定されスタートゾーンからやり直し。再度キャッチゾーンまでは進めなかった。 審判は試合中ずっと自販機の下の小銭を探す体勢で大変そうだったのだが、ちゃんと仕事してて本当に偉いです。 奈良A Decoy(優勝)
この頃既に近畿地区は和歌山の1強状態から和歌山と奈良の2強に移行しており、地区優勝もその2校で分け合うような様になっていた。
今年は和歌山の3連覇を奈良が阻止した。
ローラーによる2つの発射機構はシンプルだが、投げ入れの失敗を無くすための大きな投入口や、ローラーへボールを導くソロバンガイドなど細部には工夫を凝らしている。
ディフェンスロボットは2つの釣り竿でシートを5mまで展開。 近畿地区大会は1回戦14秒、2回戦13秒でタッチダウンを決め勝利。 準決勝の相手の大阪Bは1回戦を12秒で決めた強敵だったが、ディフェンスロボがしっかり2回ガードし、自身は高い軌道でのタッチダウンを決めて勝利。 同校決勝となった決勝戦では相手オフェンスロボに近い位置でプレッシャーを与え1球しっかり止める。相手がタッチダウンを止められなかった後、落ち着いて(それでも20秒)でタッチダウンを成功させ優勝した。 全国大会では準々決勝で全国大会最速の9秒をマークしたが、その直後に対戦相手の仙台(名取)に記録更新の8秒で破られてしまう。 全国放送で確認できる限り、この試合が最速を競い合った事実上の決勝だったと言えよう。 大会放送ではボール投入口が網とプラ段ボールで跳ね返りの時間ロスが違ったと解説されていたが、それもさることながら奈良のローラー撃ち出しは仙台(名取)のカタパルト方式と比べローラーにボールを押し込むという1アクションが追加で必要なことが大きかったのではないだろうか。 奈良B ボールBANG!!(準優勝)
奈良初の同校決勝は奈良の学校全体としての力が上がっていることの証明でもある。
しかもここから7年連続でかならず1チームは決勝に駒を進め、2年後の2013年「Shall We Jump?」では2回目の同校決勝を果たす。
Aチームはローラー型だがこちらはゴムによるカタパルト方式で、5mのディフェンスを超える高さの投擲も可能。
ディフェンスロボットはアイディアはAチームと殆ど同じ(ほかの殆どのチームと同じとも言える)だが、構造的に全く同じではない模様。 1回戦は片方のカタパルトに2つボールを入れてしまうミス。ボールを2投したがいずれも取れず攻守交替。相手が動けなかったため判定3-0で勝利。 2回戦もボール投げ入れに3球失敗し、唯一放ったボールはメンバーまで届かなかった。またしても判定3-0で勝利。 奈良ほど調整・練習していてもボールの投げ入れには失敗することもある。勝てたとはいえ試合への人の影響度が良く分かる試合だった。 しかし準決勝の強敵和歌山Aとの対戦でついにミスなし最大性能を発揮。近畿最速タイの9秒でタッチダウンを決めて劇的な勝利をおさめた。 決勝戦ではボールがうまく飛ばなかったり止められたりで残弾を消費してしまい、最後の1投はどうしても相手ディフェンスを避ける方向に飛ばさざるを得ずキャッチ時にゾーンアウト。 和歌山A ウメトラマン(技術賞、本田技研賞、全国出場)
歩行機構にアルミ角材だけでなくアルミ板も使用しており、見るからにしっかりした構造。
バネの力で2つのアームでボールを同時に投げる。どうもアームは高い軌道用と低い軌道用の2種類に分けているあるようだ。
ディフェンスロボットは十字状のネットとシートを釣り竿で伸ばすようになっているが、その駆動源は空気ではなくメジャーをモーターで巻き取って釣り竿の中に入れている。 近畿地区大会1回戦はいきなり近畿最速の9秒をマークし勝利。2回戦も1つ投げ入れに失敗したのに10秒。とにかく速い。 準決勝もまた1つ投げ入れに失敗しつつも11秒。また勝利は決まりかと思われたが相手に9秒で決められてしまった。 それでも強さは皆納得するところ。技術賞で全国大会へ。 全国大会1回戦では9秒でタッチダウンを決めるなど強さを見せるが、準々決勝の北九州 ViGo戦で痛恨のキャッチミス。 タイムでは勝てる相手だったはずだがまたしても人的要素に阻まれることとなった。 和歌山B 光線をクエ
読み方は「レーザービームヲクエ」。和歌山は魚のクエが名産で、マシンにもクエの絵や「クエのまち日高」がいくつも書かれており、積極的にPRしている。
ボールの投げ方は、四角形の隅4か所にゴムを張ったパチンコ方式。
発射部に直接ボールを入れる必要があるので投げ入れスキルが求められる。
二足歩行の脚はこの年のルールにしては攻めた大型のものだがこれもこだわりなのだろう。
前年と同じく卒研チームだった可能性が高い。
試合では2投したが飛距離が足りずタッチダウンには届かなかった。
大阪A 平衡空圧投球機
去年は「銀の戦車」で「シルバーチャリオット」。今年はこれで「トレビュシェット」。
トレビュシェット自体は固定式の攻城投石器として実際にあったものだ。
投擲機構は定加重バネのカタパルトで、旋回してボール受け取りと投擲で位置を変えることができる。
更に近畿では唯一リトライ無しで自力でカタパルトを再セットし連投が可能。
ディフェンスロボットはを釣り竿でネットを伸ばすタイプ。 1回戦は相手のディフェンスロボットが思うように動かない中落ち着いて投げて18秒でタッチダウンし勝利。 2回戦は4球中2つがマシンに乗らず、残り2つは投げる際にボールが後ろに外れてしまいタッチダウンできなかった。 大阪B すぴ→どらんにんぐ(ロボ・ボウル賞、全国出場)
2006年「ふるさと自慢特急便」のあーむすとーんろ→んぐ以来、5年ぶりに「→」のマシン名が登場。
ゴムの力で2つのアームでボールを投げる。
ボール投げ入れ部に黒のプラ段ボールを使用しており、ディフェンスロボットも黒いシートを4mの高さに展開するなど、全体的に黒のカラーで統一されている。
そういえば昔から大阪は黒のプラ段を使うことが多かったような。 近畿大会1回戦はボールの投げ入れに1つ失敗したものの12秒でタッチダウン。 2回戦は1投目のキャッチに失敗。リトライ後再セットして56秒でタッチダウン成功。 準決勝では奈良Aの高いディフェンスロボに2投を止められ敗退したがロボ・ボウル賞と全国推薦を得た。 全国大会ではボール投入口を黒プラ段からネットに変更。初戦の東京 鉄塔兄弟との対戦では素早い投球をしたものの方向が外れてキャッチできず敗退。 神戸A 鉄神
巨大ロボットマンガ/アニメの元祖、鉄人28号を生み出した横山光輝は神戸市出身。
神戸市のJR新長田駅前には高さ15mの鉄人28号モニュメントや鉄人型の電灯が設置されている。
この鉄人はJR神戸線からも良く見える(ただし後ろ姿)ため、神戸市民には非常に馴染み深い。
そんな鉄人に神戸をかけた鉄神。ネーミングはよかったのだが…回路が焼けてしまうトラブルでスタートゾーンから出られず。
回路ってなぜか試合直前に焼けるんですよ…。
テストランではしっかり歩行して投げていたのだが残念な限り。
投げ方は2門カタパルト方式で、ディフェンスロボのロジャーアーム2つで幕を展開する形。
神戸B Spring Quad(東京エレクトロンFE賞)
こちらも2門カタパルトだが、安定性のためかなり低重心に作られている。
マシン名のとおりバネを合計4本使っているのが見える。
ディフェンスロボははしご車のようにアームを伸ばして網を展開。この網はなんと荷造り紐で1日以上かけて自作したという。
相手ボールを取るために硬さなどにこだわったのだろう。 こちらは試合でも安定して歩いて投擲もできており、近年の神戸としては良い仕上がり。 シードを引く運も持ち合わせていたのだが(Aチームもシード)、当たったのは連覇中の和歌山A。 緊張からかボールの投入に3連続で失敗してしまい、投げられたのは最後に入った1つのみ、しかもこれが相手に止められてしまった。 近大A 全螺(デザイン賞、マブチモーター賞)
読みは「ウツネ」。漢字なのでそういう読み方があるのかと思ったのだが、調べても出てこない。どのような由来なのだろうか。
オフェンスロボットは木製ローラー2枚ずつでボールを左右から挟み込んで撃ち出すピッチング方式。
ローラーに少し角度をつけており、ボールは螺旋状に安定して飛んでいく。
ディフェンスロボットはパンタグラフで幕を高く展開。パンタグラフ機構は動きが遅いことも多いが、これはスムーズに展開できている。 昨年に続いて歩行機構は安定しておりしっかり動いていたのだが、大会では初戦で和歌山Aに当たり、目の前でディフェンスロボットにしっかりガードされパスを阻止されてしまった。 なんと去年と全く同じデザイン賞+マブチモーター賞 近大B 空全絶号
エアシリンダー式の投擲2門を持ったマシン。振動で投げ入れられたボールの角度を調整する機構が面白い。
ディフェンスロボットは3mの幕を上げる。デザインテーマはオオサンショウウオ。
歩行がゆっくりで、試合ではボールセットまではできたものの投げるところまでは行かなかった。
|