カムチャッカ - Kamchatka -

|
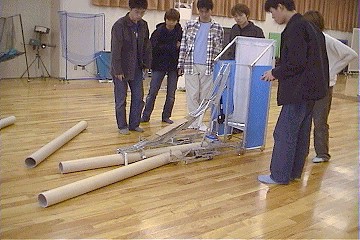
フィールドに倒れている円筒をアームで持ち上げ、 後ろの籠(た゜)に取り込んでいきます。 籠を分離させて円筒をフィールドにまとめて立てた後、 クレッシェンドと合体します。
アクチュエータ数 |
|
|
|
|
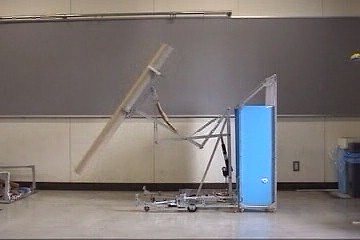
カムチャッカのメイン機構で、 足まわりの2つの他にアクチュエータはこれ1つだけです。 長さ1メートル以上の巨大なアームで円筒をつかみ、 人間の腕のように持ち上げて上から後ろの籠に入れます。 当然、かかるモーメントはとてつもなく、 実際にアクチュエータが力をかけている部分を押して動かすのは、人間の力でも非常に困難。 担当者の計算によると「力点から3[cm]の位置に小錦が乗れば同等の力になる」とのこと。 そのため、コードネームはKonishiki部でした。 ちぇんじろうの中で最も早くに考えられた機構で、 校内選考時は既に軸間の比がほぼ完成されていました。 トルクの問題で製作は困難を極めると思われましたが、 徐々にスピードアップもなされ、円筒をつかまない場合は 1~2秒ほどで上下させることも可能です。
担当者の話
|

|
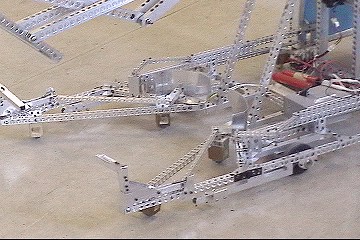
モーターは使用していないローテク部です。 アームの働きとして円筒を籠に回収することの他に、 合体後2段重ねをするときに、円筒をフィールドに対して 垂直に立てられることが要求されます。 更に、マシンの大きさ制限と非常に大きな力がかかるということから、 アームを出来るだけ短く、欲を言えばアクチュエータを 使用しないようにしなければなりませんでした。 それらを全て解決したのがこのスライドするハンドです。 ハンドの機能的な動きはアームの動画を見れば分かると思います。 円筒にはまる四角い輪のうち先端の方は円筒を包み込むだけで、固定はしません。 もう片方はゴムで円筒を挟み、アームが持ち上がると円筒の重さで下にスライドします。 これにより円筒はフィールドに接した状態で垂直に立ち、 更に円筒のより先端部分をハンドが持つことになります。 このままアームを持ち上げると丁度いい具合に籠に円筒が入ります。 ハンド内部には円筒がスライドしやすいように、手製のローラーが付いています。
担当者の話
|

|
クレッシェンドと合体するときには、カムチャッカの前が左右に開きます。 これにより、アームの位置とクレッシェンドのローラーの位置が合うのです。 この展開はカムチャッカの先端をクレッシェンドの後部のバーに当てて、 ストッパーが外れることにより発動します。 更にこのストッパーが外れると、カムチャッカと籠(た゜)の分離、 籠の底抜き(取り込まれた円筒がフィールドに接地する)、 籠の転倒防止バー展開も同時に行われます。 なんと一石四鳥のナイスなローテクであります。
担当者の話
|
|
荻野(M3D) , 小畑(M2) , 川野(M1) , 米田(M4C) |
|


戻る