全国大会&近畿地区大会結果
|
ルール
火星での生命探査に出発したローバー(ローバーボール)がオリンポス山の中腹に不時着したため、これを救助機(メッセンジャーボール)で中央まで到達させるというストーリー。
自チームの色のアメリカンフットボール(ローバーボール)をフィールド中央にある高さ300mmの円形台(オリンポス山)の中央のオリンポススポットに近づけ、その距離を競う。
オリンポス山とフィールドの間にはスロープがあり、試合開始時には各チームのローバーボールはそのスロープにある。
ローバーボールの移動とオリンポス山への侵入は、自動制御で動くマシン(メッセンジャーボール)で行う。
メッセンジャーボールの起動スイッチを入れられるのは手動マシンのみ。
メッセンジャーボールは何台あっても良い。リトライを1回のみ申請可能。ただしメッセンジャーボールはリトライ不可。
マシンの操縦は赤外線・可視光・音波による遠隔操縦または自動制御。競技時間は3分。
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
近畿大会概要
2018年以降、ロボットの自動制御がルールに組み込まれるようになったが、自動制御が必須のものとして採用された初めてのテーマはこのマーズラッシュである。
ルールでは自動機はメッセンジャーボールという扱いだったが、メッセンジャーボールはボールまたは機構の付いたボールという扱いだったので、当然機構付き(つまりマシン)ばかりとなり、ボールというのも有形無実化。全国放送のルール説明ではメッセンジャーボールという言葉は使わず自動ロボットとして扱われていた。
とはいえ求められる動きが、「ボールをフィールド中心部に近づける」という単純なものだったため、自動制御自体が2018年のように特段大きく取り上げることはなかった。
ロボコン大賞を受賞したマシンもバネの力で展開するだけなので「ロボットというよりただの機構(製作者談)」である。
なお、このマーズラッシュというテーマは、1990年 第1回 IDCロボコンのテーマであるゴールドラッシュを参考にしていると思われる。
ゴールドラッシュもまた山の頂上の得点物を目指す競技だった。
最近はNHKはIDCに関わっていないようだが、この頃はまだぎりぎり関与していたはずなので、ルール決めの際に過去のテーマを参考にした可能性はあると思うのだがどうだろうか。
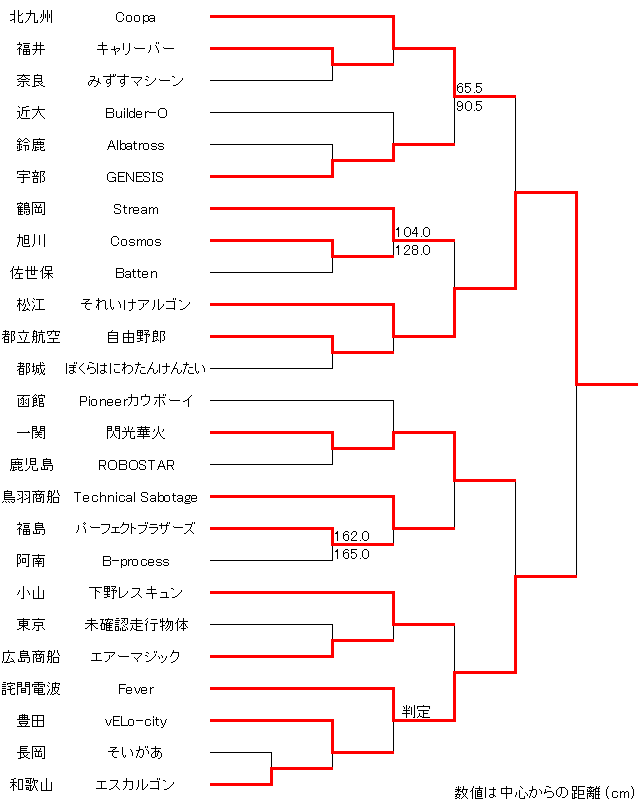
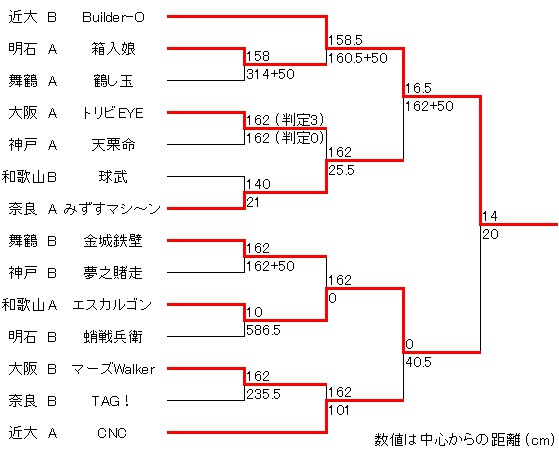
近畿大会出場マシン前述のとおりマシンの定義の用語が直感的でなく分かりづらかったため、大会放送では「メッセンジャーロボット」「自動ロボット」「子機」など色々な呼ばれ方をしていた。 ここでは手動機、自動機と呼称することとしたい。 また、勝敗を決めるローバーボールのオリンポススポットまでの距離はトーナメント表ではcmで記載した。 某先生も仰るとおりcmは素人くさいのだが、大会での距離計測値の単位がcmだったので、それに合わせている。 さて、この年を語る上で避けて通れないので妨害である。 この年に試合を大きく左右したのは、アイディア・技術よりも「妨害」だったのが現実と言えよう。 目標地点が1か所で単純な動作しかしない相手の自動機を妨害することは容易い。 しかもフィールドはチーム別ではなく1つ、マシン台数制限も無し、ということで妨害専用マシンを作るチームが続出。 特に全国大会はトーナメントが進むごとに妨害の成否が勝敗を分ける妨害合戦の様相を呈した。 昔から妨害は多少あったものの、ごく一部のみで大会全体の色に影響するほどのものではなかった。 しかしこの年は前述の有様で、2001年の全国決勝に端を発する妨害是非の論戦が再燃。 運営側もこれ以上は看過できんとばかりに翌年からチームごとにフィールドを区切ったルールに転換した。 この辺りの流れはABUロボコン(大学ロボコン・学生ロボコン)とも似ている。 近畿地区にも妨害機構を備えたマシンは多く見られたが、その動きは比較的穏やかだった。 勝ちたい気持ちはあると言っても、全国で目立った一部の高専ほど極端ではない。そももそレベルが低かったのでそこまでエグいものも作れなかったとも言う。 さて妨害のことはそろそろ置いておいて、この年の近畿地区最大のトピックはなんと言っても近大の優勝である。もうこれ以外にない。 2020年度現在において近大高専(改称前の熊野高専も含め)唯一の地区優勝である。 既に何度かここで書いていると思うが、この頃の団子でレベルの低かった近畿地区の中では近大は2チームとも毎年比較的安定していた。 特に1999年以降はほぼ毎年ベスト4以上、準優勝も3回という好成績を残しながらも、どうしても優勝には届かずにいた。 しかしついに主管校のこの年に悲願の初優勝を実力で成し遂げたのだ。 しかも近大はもう1チームも実力で(この頃の近畿地区は判定勝負が多かったので、ちゃんと「実力で」という一言を添えておきたい)ベスト4まで勝ち上がっており、同校決勝も目前であった。 準優勝の和歌山も優勝できるくらい強かったが、学校レベルで活躍したのは文句なしに近大だ。 なお昨年度から近畿地区大会は各高専の体育館ではなく大きな施設で実施することになっていたが、この年は近大主管のため近畿大学記念会館で開催。 公立体育館並みの大きなキャパを用意できるのはさすが巨大大学の高専である。 近畿地区大会の結果を一通りさらうと、まず優勝は前述のとおり近大B Builder-O。熊野高専時代から通じて2年ぶり3回目の全国出場である。マシン名のBuilerシリーズは3代目となった。 AチームのCNCはベスト4だけでなくアイディア賞も受賞。もう近大の年である。 準優勝は和歌山A エスカルゴン。成績の数字だけを見れば優勝マシンを上回る性能を発揮していたことがよく分かる。 全国推薦も得て、3年ぶり7回目の全国進出を決めた。 エスカルゴンは更にデザイン賞も受賞。 ベスト4マシンにも3賞(アイディア賞・技術賞・デザイン賞)を出すことは今でもあるが、優勝・準優勝マシンに3賞を出すことは過去の地区大会全てを対象としても数例しかない(今後は基本的に無いと思われる)。近畿地区では2020年現在この1例のみである。 全国推薦もう1チームは奈良A みずすマシ~ン。技術賞も受賞しており、試合でも良い動きを見せていた。 昨年の復活から2連続で7回目の全国出場である。 この時点で近畿地区の全国最多出場は舞鶴、大阪、奈良、和歌山の4校が7回で並んでおり、次点も6回(神戸)で見事な団子状態だった。 この年から司会はタージンではなくNHKアナウンサーが務めるようになった。これはどうも全国的に同じ方向性だったようだ。 タージンは1994年から2003年の実に10年に渡り近畿大会の顔として司会進行をこなし大会を盛り上げてくれた。 マシンが動かずグダグダだった頃の近畿大会にはタージンは必須とも言える存在だったが、近畿地区も少しずつ力をつけつつあった。 そして収録にリポーターを付けるようになったのもこの年からである。開催場所を大きくするなど開催規模を拡大する流れの1つと言える。 地区大会のリポーターは今では各局のアナウンサーが殆どだが、初期は芸人のことも多く、この年はロザンだった。 関西の高学歴芸人ということだが、彼ら自身は文系である。大会でもそれをネタにしていた。 大会放送ではなんとロザンのリポートという形で全国推薦を協議する会議が映し出された。 ロザンは会議室入口までだが、カメラは会議室内に入り、協議している様子(声も聞き取れないがうっすら)が思いっきり映されていた。
舞鶴A 鶴し玉(マブチモーター賞)
昨年、拍手鶴采で近畿優勝したチーム。昨年は堅実な機構を作り込んだ印象だったが、今年はかなりアイディアを入れてきた。
オリンポススポットに傘を展開する妨害用の自動機は非常に高速。高速で台座に激突した衝撃で傘の部分をスポット目掛けて放り出しているようだ。
ローバーボールを取り込む自動機は、スロープを左右から挟み込んで進み、取り込んだ後はアームを上部に展開して空中でスポットに近づける。
このアームはなんとプロペラの揚力のみで展開するようになっている模様。軽量化のためだろう、アームには木が使われている。 大会ではスタート前に妨害用の自動機が発進してしまうアクシデント。これが減点1となり、競技終了時のローバーボールの位置が+50cmされてしまう。 更に再セッティングに時間がかかることになり、試合開始してもセッティングをすることに。 なんとか妨害自動機を発進させたが、既に自分のローバーボールは相手自動機に取り込まれ遠ざけられてしまっており敗退。 舞鶴B 金城鉄壁
聞くからに妨害しそうなマシン名。そして試合開始と共に分離された自動機同士で幕を展開…。やっぱり妨害や!
と思いきや、この長く張った幕でローバーボールをスポットまで移動させようというアイディア。勿論妨害にもなることを想定しているだろうが…。
最初は網でやろうとしたようだが、うまくボールを移動させられなかったので布に変更された。
更にテストランまでは布を縦に巻いて収納していたのが、うまく展開できないということで、畳んで台に置いておくようにした。
自動機の駆動方法も凝っており、バスケットボール(?)を横から挟み込んで回転させて自動機を移動させ、旋回時はボールと起動モータをそのまま旋回させている。 1回戦、自動機はスタートしたがローバーボールを動かすところまではいかず止まってしまう。他に出来ることがないので、手動機で相手の進行を妨害。 相手の違反による減点のおかげで勝利。 しかしこの試合で自動機が故障してしまったらしく、2回戦は手動機をゆっくり動かすことしかできなかった。相手の妨害をしようとしたようだが間に合わず敗退。 明石A 箱入娘
3台の自動機が時間差で走り出しローバーボールの取り込みと相手の妨害にまわる。更に予備の得点用自動機もフィールド反対側にセット。
自動機はどれも非常にコンパクトに作られており、このあたりに製作者のポリシーが感じられる。
相手のローバーボール取り込みに使う自動機には2台用いており、1台はガイド用となっている。
どういうことかというと、2台を紐で繋いでおき、ガイド用の1台はスロープの自陣側に走らせる。
スロープの反対側に行ったもう1台は紐にひっぱられて動きが制限され、相手ローバーボールの横に辿り着くという寸法だ。
ローバーボールを取り込んだ自動機は手動機で回収し、スロープまで移動させてオリンポススポット目掛けて発進させる。
3台の自動機のスイッチをまとめて入れるため、手動機は大きな板を自動機達の上から振り下ろし、自動機から上に伸びたスイッチに触れるようにしている。 1回戦では3台の自動機がうまく走り出し、全て想定位置に到達。相手ローバーボールの取り込みに成功。しかし自分のローバーボールの取り込みが動かなかった。 相手のマシンは動けなかったが、相手ローバーボールを遠くに移動させられたので勝利。 2回戦は近大Bとの対戦。自分のローバーボールを取り込む自動機が途中で止まってしまったのだが、相手のローバーボール妨害機は順調に動いてしまい、自分のローバーボールをより先に動かしてしまうことになった。これは違反行為で減点。 予備の自動機を動かしてローバーボールを移動させようとするも、取り込みと同時に脱輪しスロープから転落してしまう。 結局減点が決定打となり敗退。 メンバーは「近年稀にみる完成度だったのに」「もう二度と勝てない気がしてきた…」と言っていたが、いやいや来年はそれを上回るぞ。 明石B 蛸戦兵衛(ソリッドワークス賞)
この頃から明石はまたマシン名にタコを頻繁に使いだすようになる(過去には1992年 はこ坊+タコ坊など)。
チーム全員がロボコン初参加らしいが、アイディアを詰め込んでちゃんと動くマシンを作ってきたのは見事。
ローバーボールを取り込む自動機はスタート時は高速自走スロープに乗っており、これがオリンポス山側面に激突するとその勢いのままスポットまで辿り着く。
そこからアームで網をローバーボールまで伸ばして包み込み、アームを曲げ戻してスポットへ。
自動機がスポットに辿り着いた時の角度がシビアだが、速攻でスポットを確保するのは攻防の観点で有効なアイディアだ。
手動機は自動機ゾーンに置いてあったバレーボール(メッセンジャーボール)を取り込んで、ローラーで撃ち出して相手のローバーボールを妨害。
または自分のローバーボールに当ててスポットに近づけようという作戦。
このあたりの絵図は1992年「ミステリーサークル」や1995年「ドリームタワー」のようだ。 試合では自動機のスポット角度が悪く、ローバーボールを取り込めなかった。 手動機でバレーボールを撃ち出すも、やはりアメフトボールはうまく転がってくれず、スポットから大きく遠ざかってしまった。 相手の和歌山Aはスポット近くまでローバーボールを運んでおり敗退。 しかしマシンの一通りの動きは見せられており、この時期のロボコン初参加チームとしては十分な結果だったと言えるだろう。 奈良A みずすマシ~ン(技術賞、全国出場)
名前からも想像できるとおり、昨年のデジかめだ~の流れをくむチームがこちら。マシンのフォルムもよく似ている(特に手動機)。
自動機には左右に大きく開くアームが付いており、これがスロープを両脇から掴んでガイドにして進んでいく。
この大きなアームがミズスマシの脚のように見えるのでみずすマシ~ンということだろう。
そして伸縮クレーンの先端ハンドでローバーボールを掴み、オリンポススポット上空まで伸ばす。この伸縮クレーンもデジかめだ~のアプローチと似ている。
ローバーボールとオリンポススポットの左右位置はずれているので、ローバーボールを掴んだ後はクレーン全体が横移動するのだが、この辺りの機構が見事に高専ロボコンしていて素晴らしい。
デジカメだ~もそうだったが、機構の造りが全体的によく出来ているのだ。
手動機はリフト機構で自動機を持ち上げてスロープまで持って行って自動機を発進させるのがメインのお役目。
自動機にトラブルがあった時には、自動機のスタートゾーンに置かれたボールを飛ばしてローバーボールを動かす。
この飛ばし方も面白い。ボールを横から挟んで掴み、ハンド部で回転させて前スピンをかけて離すことでボールが飛んでいく。
強すぎず、狙いを調整しやすくした結果こうなったのだろうか。
コントローラからはプロポのようにアンテナが伸びているが、先端に付いているのは下向きの赤外線LED。
前後左右を覆った手動機の受光部に上から赤外線を照射している。赤外線通信は会場照明に簡単にやられてしまうため、対策の工夫が浸透してきた頃だった。
木製の妨害自動機も用意していたが、近畿大会では完成度が足りず出場はさせなかった。 近畿大会1回戦は和歌山Bと対戦。順調にローバーボールを伸ばすことができたものの、クレーンを伸ばしきるところで自動機全体がスロープ後方に少しずれてしまった。0距離はならなかったが初戦突破。 2回戦も最後で後ろにずれるところまで全く同じだったが、それ以外は終始危なげなく勝利。 準決勝の相手は近大B。前の試合では使っていなかった妨害機でスポットを覆われてしまった。これで焦りが出たか、自動機の発進角度にずれが生じ、スロープの途中で止まってしまった。 ボールを飛ばしてローバーボールを移動させようとするも動かせず、ここで敗退。しかし期せずして手動機の撃ち出しアイディアを披露することとなった。 ここまで見せれば技術賞と全国推薦は文句なし。昨年に続いて全国出場を決めた。 全国大会は1回戦で福井 キャリーバーと対戦するも敗退。この頃の全国放送は本当に一部の目立ったマシンしか映らない芸能界のような様相で、どのような試合だったのか分からない。 奈良B TAG!(本田技研賞)
割と動いていたのに1つのミスで敗退してしまったかなり勿体ないマシン。
妨害機は作らず、自動機の動きも前後とボールを掴むだけに切り詰めて、残りの移動は手動機で行うなど上手く割り切れている。
かといってローテクに徹したわけでもなく、ロータリーエンコーダで距離を検出するなどはしている。
自動機の機構とデザインも素晴らしく、ハンド付きの2関節のアームが展開した時には会場から感嘆の声が上がったほど。
去年の奈良Bチームと全く同じメンバーだったそうだが、技術的にも内容的にもかなりの進歩が垣間見えるマシンだった。 試合では順調な動きを見せていたが、ローバーボールを掴むのに失敗し初期位置から遠くに転がしてしまった。 相手のローバーボールも移動させようとしたが、自動機が途中で止まってしまい妨害ならず。相手よりもずっと動けていたにも関わらず初戦敗退となってしまった。 和歌山A エスカルゴン(準優勝、デザイン賞、全国出場)
近畿地区で唯一ローバーボールをスポット0距離まで運び、準優勝だけでなくデザイン賞まで取ってしまった優秀優良機。
試合では安定した性能を発揮しており、前日からの優勝候補本命だったと思われる。
和歌山は2006年から2015年まで10年連続全国出場を果たすが、その黄金期の流れはここから始まっていると言える。
翌年の2005年は全国こそ逃しているが、マシンの完成度は十分高くベスト4入りもしている。
そして技術をしっかり引き継ぎ、2006年から10年連続全国、うち4回近畿優勝、更に2年連続全国準優勝という怒涛の快進撃が始まるのだ。 ローバーボール運搬用と妨害用の2つの自動機を駆使して戦うが、妨害機もそこまでエグくはない。 2台とも初期状態では台座に乗っており、これに自動機が横から連結して移動させ、自動機を発進させるというもの。 妨害機はぐるぐる巻きにした黒いケーブルガイドをオリンポス山で展開することで相手を妨害する。このぐるぐる巻きがマシン名の由来である。 先端に二股の触覚を付けており、カタツムリらしさを出している。 得点用の自動機は片側のスロープ端をセンサで読み取り全身し、ローバーボールを掴んでスポットまで持って行く。 全国大会向けてはスピードアップのため大幅に改造を施している。手動機で自動機を運ぶのはやめ、どちらもスタート地点から自走させるように変更した。 このため手動機はスイッチを入れるだけの役割となった。得点用自動機は自走台座でスロープに横づけして分離するようになっているようだ。 近畿大会1回戦では妨害機はフィールドに無く、最初から使わなかったようだ。トラブルがあったか、相手のマシンが速攻型だったので無意味と判断したか。 相手に先にスポットに接近されたが、落ち着いて自動機で自分のローバーボールを近づけて勝利。 2回戦は妨害機も動かしてカタツムリを展開。更に近畿大会で初めてローバーボールをスポットまで移動(0距離)させることに成功した。 準決勝でも同様の動きで連続0距離を達成し勝利。 この流れで優勝と行きたいところだったが、決勝の相手は素早いみかん攻撃(妨害)を持つ近大B。風船は膨らまなかったが、スポット周辺を取られてしまった。 相手はクレーンで上空を狙うタイプなのでエスカルゴ妨害は無意味。早々に妨害機を切り離し、得点機のみを移動させて発進させた。 なんとかスポット20cmまで接近させたが、相手は上空で14cm。僅差で優勝には届かなかった。しかしデザイン賞と全国推薦を獲得。 全体大会、1回戦は長岡 そいがぁと対戦。速攻型にした妨害機もうまく機能し勝利。これがこの年の近畿勢で唯一の全国初戦突破だった。 2回戦は豊田 vELo-cityと当たってしまった。スピードアップしたものの最速機には及ばずここで敗退。本田技研賞を受賞。 和歌山B 球武
メンバー全員がロボコン初参加。この頃の和歌山はほぼ毎年初心者チームが出場していた。校内の出場枠の関係上そうなっていたのだろう。
ということもあってか、マシンにはセンサや自動制御は極力使わずシンプルなものとした。
バレーボール4つをタイヤ代わりにした箱型の自動機がスロープを登ってローバーボールを押していく。
オリンポススポットに到達すると、上に跳ね上げていた大きな箱型のカバーを降ろしてオリンポススポットを覆ってしまう。
バレーボールを回転させるのは各ボールに2つ取り付けられたタイヤ。基本的に前後の移動しか想定していないようだ。
手動機は自動機よりも一回り大きな箱。自動機を丸ごと抱えてスロープ手前まで移動させる。 近畿大会では1回戦では自動機を発進されられたものの、ローバーボールを押し込むパワーが足りなかった。 マシン紹介の映像でも同様だったので、バレーボールタイヤへの駆動伝達が十分でなかったと思われる。 回らないバレーボールを回転させようと負荷がかかり続けた結果、配線(恐らく)がスモーク。メンバーは思わず駆け寄ろうとしたが、審判に制止されたように見えた。 その後も試合が終わるまで手出しできず、発煙をただ眺めることになってしまった。 今ではありえない進行だが、この頃は非常停止ボタンも緊急時の取扱もルールに定められておらず、審判も何も判断できなかったのだろう。 試合後のコメントは「色んな意味で完全燃焼してしまいました」 大阪A トリビEYE
マシン名から想像できるとおり、画像認識によるローバーボール検出を目指したマシン。
Kinectどころか単にるカメラモジュールの入手すら容易ではなかったこの時期によく挑戦したものだ(Windows向けKinectの発売は2012年)。
大会放送では画像認識は大学院レベルと評されていた。
カメラは自動機の上部から見下ろすように取れつけられており、自チームの色のローバーボールを認識して取り込み、オリンポススポットまで移動する。
ローバーボールを取りこぼした場合には、別のシンプルな作りの自動機が拾い上げてオリンポス山の台座に転がり落とす。
こちらの自動機にもカメラが付いているのかどうかは不明。
手動機は箱型で、カメラ付きの自動機のスイッチを入れる役目と、もう1台の自動機を持ち運ぶお役目がある。 近畿大会1回戦では自動機はスタートしスロープの手前まで行ったものの、ローバーボールを検出できずじりじりとフィールド内を動き回るだけとなってしまった。 しかし相手も0点だったので判定3-0で勝利。 2回戦は試合開始後もセッティングし自動機をスタートさせたが、やはりローバーボールには辿り着かず敗退。 試合後のパフォーマンスでは、近距離からならボールを認識できることを披露することができた。 大阪B マーズWalker(関西電力賞)
釣り竿を伸ばす速攻妨害自動機とローバーボールを運ぶ自動機、そしてスイッチを入れる手動機という構成。
釣り竿の先端からは細長風船を膨らませて相手のローバーボールの進路を妨害するという念の入れよう。
妨害機にかなり力を入れていたようで、マシン紹介映像でも妨害機はよく動いていたが、ローバーボール運搬機は未完成のようだった。 1回戦では手動機の調子が悪くリトライ。その後も、得点には寄与しないのに時間最後まで妨害機のスイッチを入れようと動いていたので、やはりこだわりがあったようだ。 自分のローバーボールは動かせなかったが、相手はミスで遠ざけてしまっていたため勝利。 2回戦は妨害機がうまくスタート。オリンポススポットに衝突したはずみで部品が吹っ飛んだが、竿と風船が展開し妨害に成功し見せ場を作った。 しかしもう1台の得点機は動かせず、相手がローバーボールを風船越しに押し込んでスポットに近づけたため敗退。 力を入れた妨害機が試合で動いたので、そこは大いに喜んでいた。 神戸A 天栗命 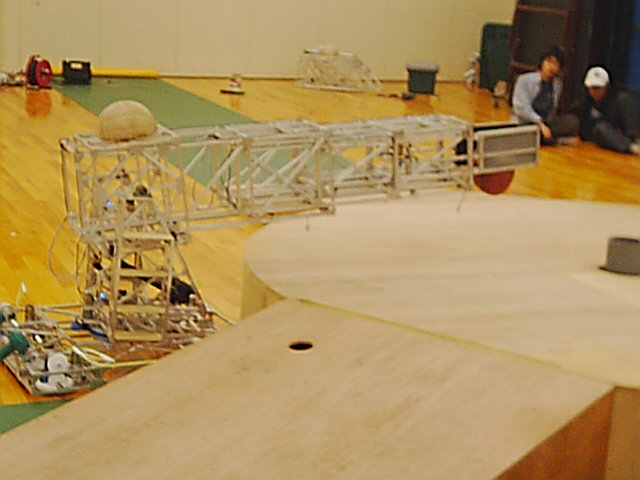 栗太郎、撃ちま栗と来て、栗シリーズラスト作は天栗命(あまのくりのみこと)。 自動機は写真のような戦車型で、3段ボックス入れ子構造の伸縮アームでローバーボールを掴んでオリンポススポットに近づける。 砲身の仰角駆動は大きなトルクが必要だが、2001年のちぇんじろうで使ったボールねじシリンダが活躍している。 撃ちま栗も相当トラストラスでメカメカしかったが、可動部と複雑さでははるかに上回るゴリゴリのロボットだ。 手動機も低重心ながらこの超重量戦車を丸ごと持ち上げる強力なジャッキ機構を備え、ロケットの運搬台車さながら。 機構のこだわりと美しさに全振りしたマシンと言えるだろう。リーダーがこだわり派だったからねぇ。まったく神戸のリーダーはこだわり強いやつばっかやな。 それにも関わらず機構の完成は早く、夏休みには手動機も自動機もほぼ出来上がっていた記憶がある。 しかし制御系が追いつかなかった。まさに機構全振り。いや実際はそんなつもりは当然なくて結果的にのはずだけど…。 自動機の位置制御などはしていなかったため、オリンポス山への進入角度の調整に苦労し、なかなか思う位置まで移動できなかった。 もっともこの頃の制御レベル的には、位置制御はやっているチームの方が珍しかった。後は、通信系も詰め切れていなかったようである。 自動機のスタートは、手動機から棒を倒してスイッチを入れるタイプ。 近畿大会では手動機の遠隔制御が動かず、自動機もスタートさせることができなかった。相手も0点だったが、相手はマシンは動いていたので判定0-3で敗退。 神戸B 夢之賭走  こちらもトラス橋を伸ばしてローバーボールをスポットに近づけるマシンなのだが、スロープ手前から空気圧で一気に伸ばす。 空気圧の調整が難しく、強すぎると橋の先端が吹っ飛んでいくという危険な代物。 マシン名も友情・努力・勝利系と思わせておいて、よく見ると架橋ではなく賭走なあたり、ネタを仕込んでひねりたい関西人の気持ちが感じられる。 神戸高専においてペットボトルエアタンクを初めて使用したのがこのマシンである。勿論CCレモン。 ガガーリンもペットボトルエアーではあったが、あれはほら、それ自体がマシン推進力というとペットボトルロケットそのものだったので。 この頃は丁度全国的にもペットボトルエアータンクが普及し始めた頃だった。更に翌年以降は障害物レースのテーマが多くなり、多数のアクチュエータを仕込むためエアーの採用が増えていく。 手動機はトラス橋を丸ごと抱えて移動させるシンプルな低重心機体。 1回戦、スタートと同時にうっかり操縦者以外のメンバーがフィールドに入ってしまい減点。慣れない試合になるとみんな結構テンパるからなぁ。 手動機で自動機を運ぼうとするも、相手の進路妨害にあい発進ならず。どちらもローバーボールは動かなかったが減点があったため敗退となった。 試合後のパフォーマンスでは吹っ飛ばさずにちゃんと橋を展開できていただけに残念。 近大A CNC(アイディア賞)
どうしても優勝したBチームに目が行ってしまうが、こちらもベスト4、アイディア賞と大活躍。
ついでに2チームともシードを引いていたのだから、この年の近大は本当に「持っていた」。
Bチームと違い、こちらは妨害無し、自動機1つと潔い。クワガタの顎のようなアームを持つ自動機が特徴的だ。
手動機で自動機と台座をスロープ手前まで移動させ、そこから真っすぐ発進。リミットスイッチの組合せで各部が稼働していく。
左右に大きく開くクワガタアークでローバーボールを取り込んだら、網で少し持ち上げてスポットまで前進する。 シードのため初戦は2回戦から。対戦相手の大阪Bに妨害を決められたが、相手は自分達のローバーボールを動かせず。 試合終了間際に自動機でローバーボールを少し押し込んで初期位置からずらすことに成功し見事勝利を収めた。 この時、審判が横で待機し、試合終了した瞬間にローバーボールを手で押さえている。 これは近大の自動機は試合が終わっても続けるため、放置しておくと少しずつ進んで試合記録が変わってしまうためである。この辺りは審判もなかなか大変なところ。 準決勝は和歌山A エスカルゴンと対戦。相手に妨害エスカルゴを展開されたが、落ち着いて自動機を発進。ローバーボールを取り込んで押し込んだが、妨害に引っかかってあと一歩スポットに辿り着けない。一方相手はスポットまでローバーボールを運んでおり、及ばず敗退。 地区大会で2試合続けて妨害成功されるとは不運だが、どちらも良い試合を見せてくれた。 近大B Builder-O(優勝)
熊野高専、近畿大学高専を通じて唯一の近畿地区大会優勝マシン(2020年現在)。とはいえこの頃の近大の調子からすると初優勝はもっと早くてもおかしくはなかった。
ローバーボールをオリンポススポット上空に持って行くというアイディアは近畿地区にもいくつかあったが、このBuilder-Oは仰角45度近い4mの伸縮クレーンで高く高く吊り上げるので見応えがある。全国大会出場機の中でも最高だったらしい。試合でも大盛り上がりだった。
全国仕様では、吊り下げる紐も巻き取ってアームの先端に持ってくることで、位置を安定させつつ高さを稼いでいる。
スロープを前進する際にガイドアームを斜め前方に倒すが、これはクレーンを伸ばした時の転倒防止も兼ねている。
更にスポット周辺を手広く妨害するため、風船式の妨害自動機も用意。オリンポス山側面からスライドで機構を中心まで展開し、大きな丸い風船を膨らませる。
自分のローバーボールはかなり高い位置に持って行くため、スポット周辺はある程度の上空も含め妨害するようになっている。
この自動機はみかんと呼ばれていたらしい。 近畿大会はシードで2回戦から登場。試合スタート後もセッティングを継続している間に相手にローバーボールを動かされたが、これは相手の違反となりローバーボールは元の位置へ。 スタート後は妨害機は動かさず、得点機を移動させて発進。しかしローバーボール目前で停止してしまった。相手に減点があり勝利。 準決勝の相手は油断ならない奈良A。妨害機を発進させスポットを覆う事に成功。更にクレーンの自動機も稼働しローバーボールをスポット上空まで持ち込んだ。 決勝戦は連続で0距離を決めている和歌山A。しかし近大Bの速攻妨害が見事にはまり、相手の0距離を阻止。ローバーボールを釣り上げて14cm-20cmで勝利し悲願の初優勝を遂げた。 全国大会は1回戦シードで2回戦に宇部 GENESISと当たり敗退。しかし決勝前のエキシビションマッチに選ばれ、長岡 そいがぁと対戦することとなった。 妨害機は移動せずスタート地点で膨らんだが、これはエキシビションで相手も上空タイプではなかったため、妨害はせず膨らむ所だけ見せたということかもしれない。 直径2m以上でかなり大きく膨らんでおり、地区大会から更に大きくしたように見える。 得点機はトラブルがあったようで、神の手も使いつつスロープ手前から発進。全区大会最高位置の得点を披露することができた。 |